7. 多模块协同联调¶
7.1 基于仿真一体机的机器人应用开发¶
引言: 在前面的章节中,我们像“手工匠人”一样,手动实现了导航、视觉、机械臂模块,并尝试将它们联调。这个过程充满了挑战,但也让我们深刻体会到多模块协同的复杂性。现在,我们将探索一种更高效、更工程化的“工业化”解决方案——仿真一体机平台。
7.1.1 模块联调之痛:我们遇到了什么问题?¶
回想一下,在手动联调时,你是否遇到过这些情况?
时序同步难:
导航模块已经到达目标点,但相机模块还没初始化完成,导致拍照指令无法执行?
机械臂已经准备就绪,但视觉识别结果迟迟没有发布,导致机械臂“干等”?
一个模块执行超时,整个任务流程卡死,需要手动重启?
数据互通繁:
视觉识别出的坐标是相机坐标系,机械臂需要的是世界坐标系,中间要写一堆TF转换代码?
导航模块发布的位姿话题名称和机械臂订阅的话题对不上,需要反复修改launch文件?
模块间的消息格式不统一,需要不断调试数据解析逻辑?
状态管理乱:
一个模块执行失败(如视觉识别置信度低),其他模块不知道该如何响应?
想查看当前任务执行到哪一步了,需要同时监控多个终端窗口的日志?
想暂停任务、重试某一步骤,但没有统一的控制接口,只能“暴力重启”?
小结: 多阶段复合任务的复杂性,本质上可归结为三大挑战:时序同步难(A模块等B模块)、数据互通繁(话题配置、坐标转换)、状态管理乱(一个失败,全局崩溃)。这就像一支没有指挥的交响乐团——每个乐手(模块)都很优秀,但合奏时却杂乱无章。
7.1.1.1 问题的本质是什么?¶
这仅仅是三个模块的问题吗?
不,这暴露的是 长程任务(Long-horizon Task) 的典型挑战。
- 什么是长程任务?
长程任务是指由多个子任务按特定顺序组合而成的复杂任务流程。例如:“导航到A点 → 识别物体 → 抓取物体 → 返回起点”。每个子任务可能又包含多个动作步骤。
- 为什么长程任务难协调?
因为它不仅需要每个模块“做好自己的事”,更需要一个“大脑”(决策系统)来统筹全局,一个“神经系统”(通信与状态管理)来传递指令与反馈。
- 手工联调的局限性:
我们之前的做法就像“手工匠人”——每个模块自己管自己,靠人工编写脚本或launch文件来“粘合”它们。这种方式在任务简单时尚可应付,但当任务步骤增多、依赖复杂时,就会陷入“调试地狱”。
揭示本质:¶
我们需要从 “手工匠人”模式,升级到 “自动化流水线”模式。即:
一个任务指挥官(大脑) 负责决策“下一步做什么”
一个统一通信框架(神经系统) 负责传递指令与状态
一套标准化接口(流水线) 让模块即插即用
只有这样,我们才能从“疲于调试细节”中解放出来,真正关注任务逻辑本身。
接下来,我们将介绍如何通过仿真一体机平台,实现这种“自动化流水线”式的任务开发体验。
7.1.2 快速上手:配置化实现第一个任务¶
目标:通过简单的配置文件,快速实现"导航→识别→抓取"的完整长程任务
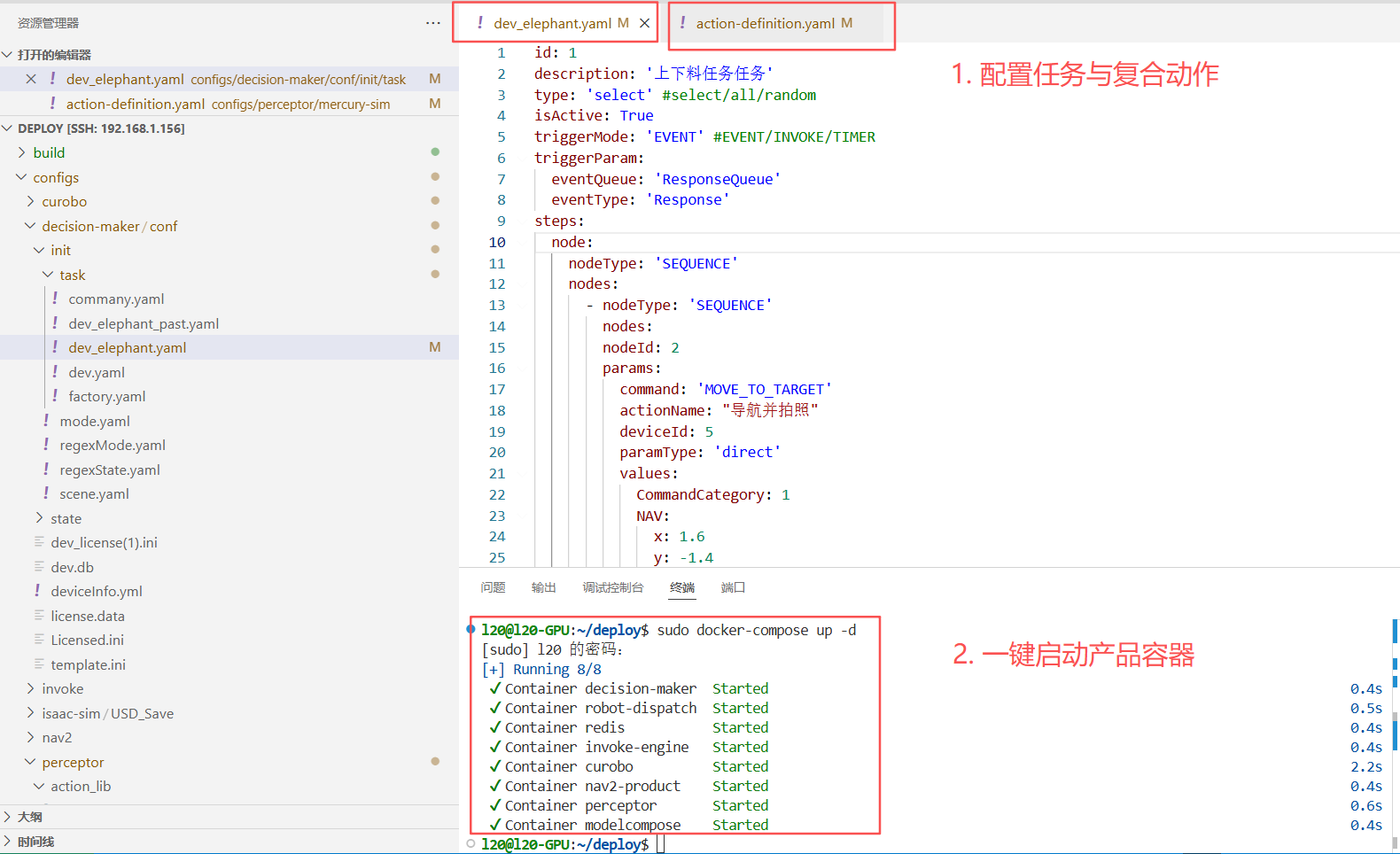
7.1.2.1 配置文件示例:dev_elephant.yaml¶
以下文件是任务编排配置文件,用于指导产品程序通过Perceptor适配层执行指令。
这三个复合任务(移动去拍照MOVE_TO_TARGET、抓取后退MOVE_TO_OBJECT、移动去放置MOVE_TO_PLACE)已覆盖决赛所有场景需求。
id: 1
description: '上下料任务任务'
type: 'select' #select/all/random
isActive: True
triggerMode: 'EVENT' #EVENT/INVOKE/TIMER
triggerParam:
eventQueue: 'ResponseQueue'
eventType: 'Response'
steps:
node:
nodeType: 'SEQUENCE'
nodes:
- nodeType: 'SEQUENCE'
nodes:
nodeId: 2
params:
# 第一个复合任务:导航+拍照
command: 'MOVE_TO_TARGET'
actionName: "导航并拍照"
deviceId: 5
paramType: 'direct'
values:
CommandCategory: 1
# 导航的目标点参数:
NAV:
x: 1.6
y: -1.4
z: 0.0
qx: 0.0
qy: 0.0
qz: -0.7599
qw: 0.6543
- nodeType: 'SEQUENCE'
nodes:
nodeId: 3
params:
# 第二个复合任务:抓取+退后
command: 'MOVE_TO_OBJECT'
actionName: "抓取物品并退后"
deviceId: 1
paramType: 'param'
values:
CommandCategory: 1
NEED: ['position', 'quaternion']
NAV:
# 退后的目标点参数:
x: 1.6
y: -0.5
z: 0.0
qx: 0.0
qy: 0.0
qz: -0.9
qw: 0.4358
- nodeType: 'SEQUENCE'
nodes:
nodeId: 4
params:
# 第三个复合任务:导航+放下
command: 'MOVE_TO_PLACE'
actionName: "导航并放下"
deviceId: 5
paramType: 'param'
values:
CommandCategory: 1
NEED: ['position', 'quaternion']
NAV:
# 导航的目标点参数:
x: -1.4
y: 0.9
z: 0.0
qx: 0.0
qy: 0.0
qz: -0.99
qw: 0.1410
7.1.2.2 三步快速启动¶
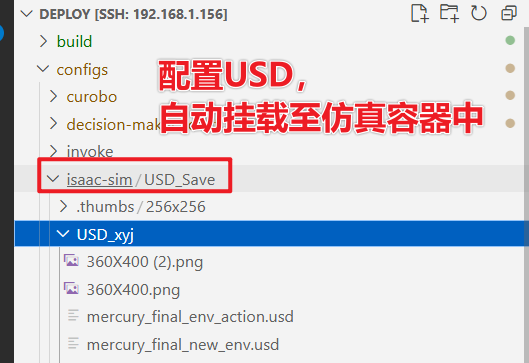
- 环境配置
# 仿真的USD文件挂载
|- isaac-sim目录
|---|- 配置USD文件
- 一键启动
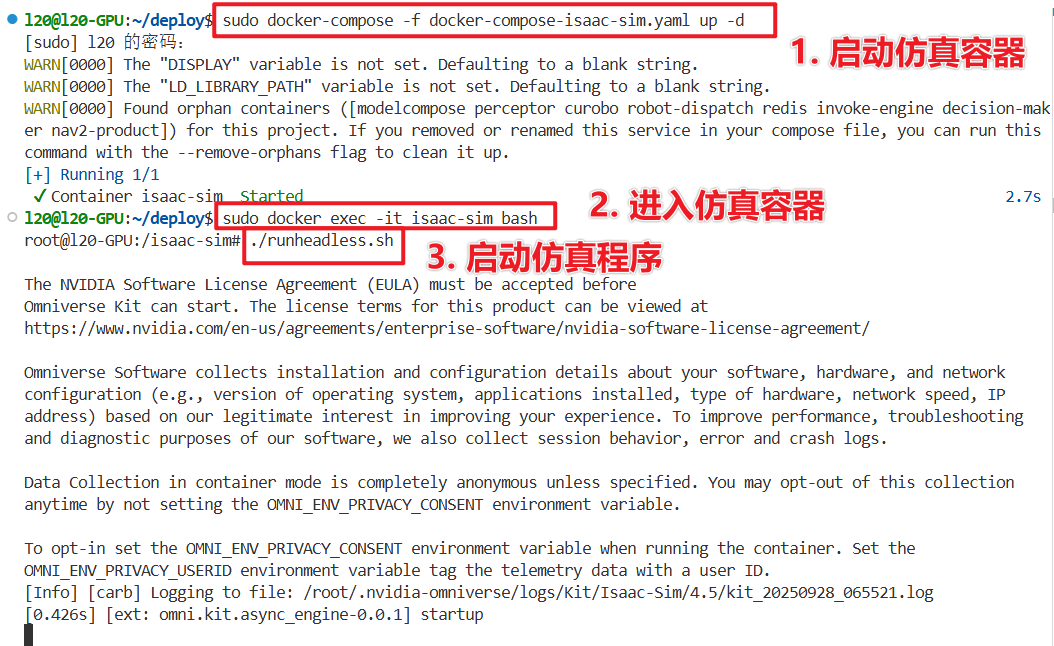
# 1. 启动仿真(确保成功启动USD文件):
docker-compose -f docker-compose-isaac-sim.yaml up -d
# 2. 启动产品:
docker-compose up -d
容器启动完毕后,确保Isaac Sim正常启动,准备触发任务开始:
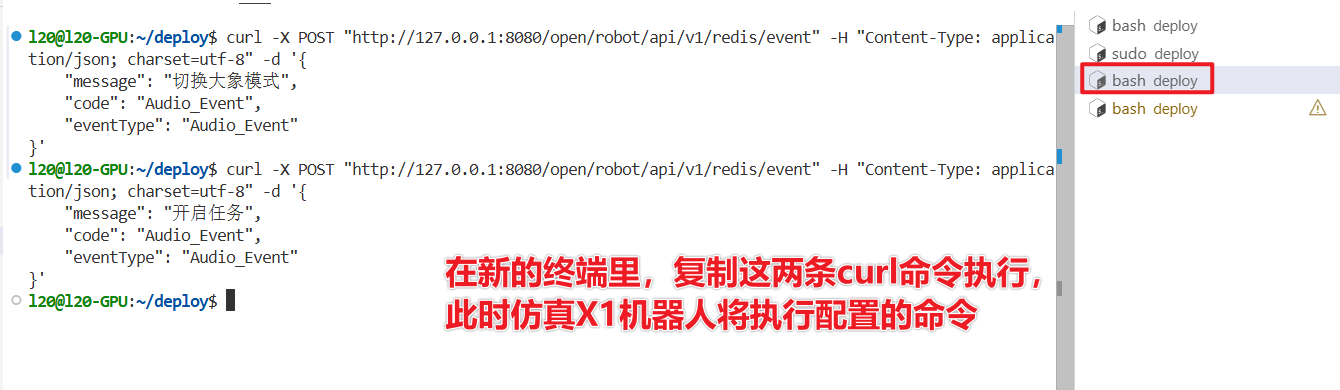
- 启动命令开关:
# 1. 切换模式
curl -X POST "http://127.0.0.1:8080/open/robot/api/v1/redis/event" -H "Content-Type: application/json; charset=utf-8" -d '{
"message": "切换大象/isaac-sim/embodied-ai-course模式",
"code": "Audio_Event",
"eventType": "Audio_Event"
}'
# 2. 开始任务
curl -X POST "http://127.0.0.1:8080/open/robot/api/v1/redis/event" -H "Content-Type: application/json; charset=utf-8" -d '{
"message": "开启任务",
"code": "Audio_Event",
"eventType": "Audio_Event"
}'
- 实时监控
# 查看日志:
docker logs -f 容器名
或者:查看目录log下的日志文件
7.1.2.3 效果对比¶
| 对比项 | 传统方式 | 仿真一体机平台 |
|---|---|---|
| 开发配置 | 编写多个Python脚本 | 一个YAML配置文件 |
| 启动方式 | 手动启动5+个终端 | 一键启动命令 |
| 联调耗时 | 耗时2-3小时联调 | 5分钟完成配置 |
| 状态监控 | 难以监控整体状态 | 图形化实时监控 |
小结:读者将直观感受到从"关心代码实现"到"专注任务逻辑"的转变,真正实现"我们只关心'做什么',而不是'怎么做'"。
7.1.3 架构解密:一体机如何协同工作?¶
7.1.3.1 产品架构全景图¶
这里放一张产品整体架构图:

该产品架构通过"任务理解规划调度 → 复合动作编排执行(协同模型推理调度、元动作执行及状态反馈)→ 机器人统一接入"的分层协作,实现对仿真机器人(Isaac Sim)和物理机器人的一体化管控。
7.1.3.2 核心数据流¶
任务请求 → 任务理解规划调度 → 复合动作编排执行 → 机器人统一接入 → 动作执行 → 状态反馈
- 智能工厂比喻:理解架构协作
用"智能工厂"的比喻来讲解数据流:
| 架构模块 | 工厂角色 | 核心职责 |
|---|---|---|
| 您(用户) | 下达订单的客户 | 提出"抓取零食"等业务需求 |
| 任务理解规划调度 | 总工程师+调度中心 | 理解订单,拆解为具体工单,分派到对应生产线 |
| 复合动作编排执行 | 生产工艺部门 | 选择最优工艺路线,调度加工设备,监控生产质量 |
| 模型推理调度 | 工艺选择专家 | 决定用"激光焊接"还是"超声波焊接"等具体工艺 |
| 元动作执行 | 标准化加工单元 | 执行钻孔、切割等基础加工动作 |
| 机器人统一接入 | 万能生产线 | 既可用虚拟材料(仿真)生产,也可用真实材料(实体)生产 |
| 仿真机器人(Isaac Sim) | 虚拟试产线 | 在数字世界中模拟生产流程 |
| 物理机器人(机器人本体) | 实体生产线 | 在真实世界中执行生产任务 |
整个"工厂"通过Redis(中央仓库,存储生产状态)和ZeroMQ(高速传送带,传递生产指令)高效连接。
- 产品目录结构

该图展示了产品暴露给用户的配置目录结构,包含多模块配置(如 curobo、IsaacSim 等)、日志、镜像路径及各类 Docker Compose 启动文件,产品实际模块已容器化。
7.1.3.3 核心技术组件深度解析¶
任务理解规划调度模块
- 核心功能:将用户目标智能拆解为可执行的原子操作序列
复合动作编排执行模块
包含模型推理调度和元动作执行两个核心子模块:
- 模型推理调度
- 智能路由:根据任务需求自动选择最优算法模型
- 策略配置:支持预设多种推理策略,适应不同场景需求
- 元动作执行
- 资源优化:动态管理CPU/GPU资源,实现高效计算流水线
- 多模型协同:并行执行不冲突的模型任务,提升整体效率机器人统一接入模块
核心价值:一套代码,仿真/实体无缝切换
统一接口:对上层提供标准化接口,屏蔽底层差异
扩展性:支持未来接入更多机器人类型和仿真平台
7.1.3.4 积木式开发:元动作与序列动作¶
- 元动作 - 基础构建块
元动作是机器人所能完成的最小动作单元,就像乐高积木中的最基本颗粒:
| 元动作名称 | 功能描述 | 对应独立模块 | 应用场景 |
|---|---|---|---|
| MOVETO | 导航移动 | 第4.2.1/5.1.1章 导航模块 | 机器人底盘运动到指定位置 |
| ARM_MOVETO | 机械臂运动 | 第4.2.3/5.1.3章 机械臂模块 | 控制机械臂关节运动 |
| GRASP | 夹爪闭合 | - | 执行抓取动作 |
| LOOSEN | 夹爪张开 | - | 释放物体 |
| CAMERA_TAKE | 相机拍照 | 第4.2.2/5.1.2章 视觉模块 | 采集视觉数据 |
| SEND_REQUEST | 请求发送 | 第5.1.3章 curobo规划 | 调用外部服务或算法 |
关键洞察:我们前面花费大量精力实现的各个独立模块,本质上就是在构建元动作库。每个模块的复杂实现被封装为简单的元动作接口,就像把复杂的电子元件封装成标准的USB接口一样。
- 序列动作 - 复杂行为组合
序列动作是由多个元动作组合而成的复杂行为,通过YAML配置文件定义:
# 示例:抓取序列动作配置
- id: MOVE_TO_OBJECT
atom_actions:
- actionId: 'SEND_REQUEST' # 请求运动规划
- actionId: 'ARM_MOVETO' # 机械臂运动到目标
- actionId: 'LOOSEN' # 张开夹爪
- actionId: 'GRASP' # 闭合夹爪执行抓取
开发价值:用户可以直接使用平台提供的"乐高组件"(序列动作),也可以像搭乐高一样,创建自定义的复杂行为,而无需触碰底层代码。
- 从独立模块到长程任务的演进路径
第一阶段:独立模块开发(手工匠人阶段)
导航模块开发 → 封装为 MOVETO 元动作
视觉模块开发 → 封装为 CAMERA_TAKE 元动作
机械臂模块开发 → 封装为 ARM_MOVETO、GRASP、LOOSEN 元动作
第二阶段:元动作组合(自动化流水线阶段)
"抓取零食"长程任务 =
MOVETO(目标点A) +
CAMERA_TAKE(识别物体) +
SEND_REQUEST(curobo规划) +
ARM_MOVETO(规划轨迹) +
GRASP(执行抓取)
第三阶段:产品化封装(工业化生产阶段)
积累丰富的元动作库
提供图形化配置界面
实现一键部署和监控
产品核心价值:我们通过总结大量机器人开发经验,将常见的机器人能力抽象为标准化的元动作库。用户无需关心每个模块的具体实现,只需通过"搭积木"的方式组合这些元动作,就能快速构建复杂的长程任务。这相当于把前面课程中遇到的所有问题,通过产品化的方式系统性地解决了。
7.1.4 完整配置与启动步骤¶
本小节会展示产品大概的操作流程与效果:
- 步骤一:配置相关文件后启动产品容器
- 步骤二:启动仿真容器与程序
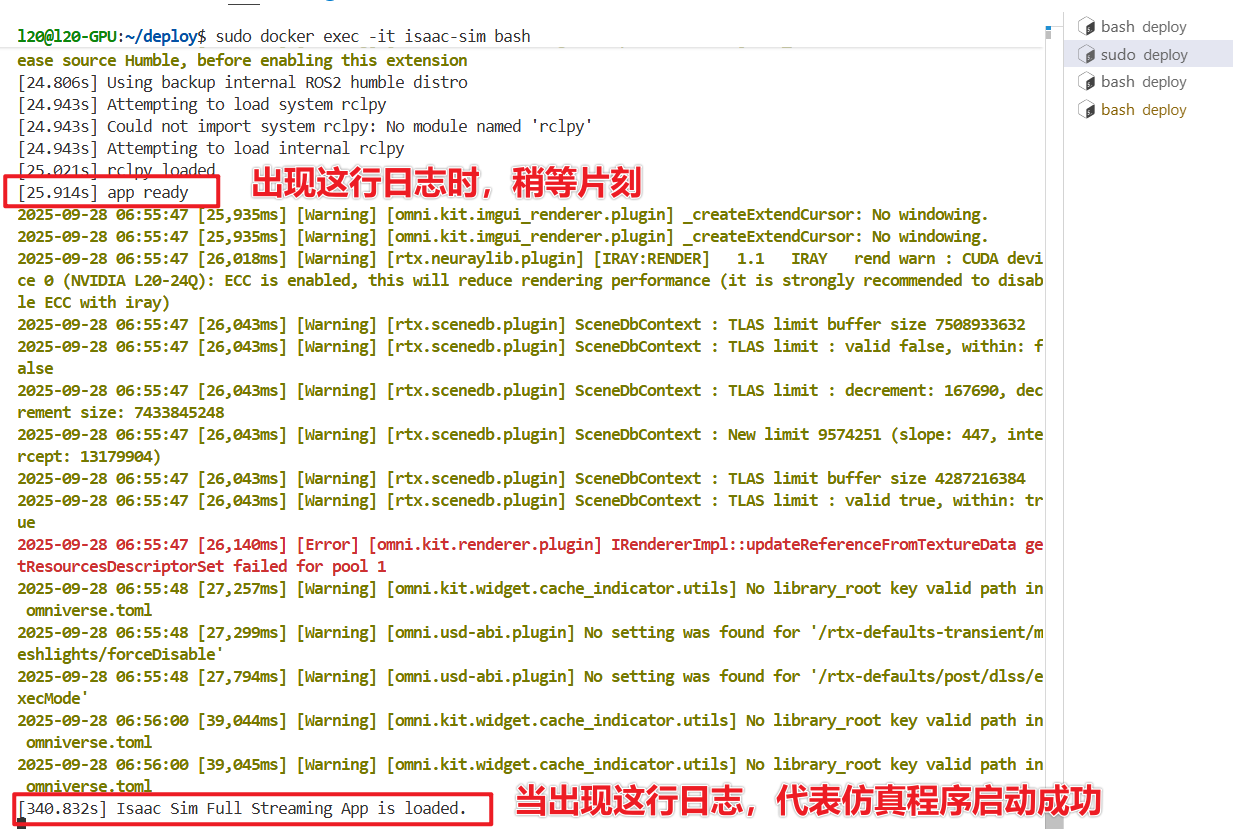
- 步骤三:发布请求开关,产品执行任务

小结:以上则是产品运行的完整流程与效果,只需要简单的配置和启动命令,即可实现复合任务。
7.1.5 总结与展望¶
7.1.5.1 回顾成长路径¶
我们从"被时序和通信困扰的手工匠人",通过仿真一体机平台,成功转型为能够指挥"自动化流水线"的机器人系统工程师。
本架构通过分层设计和模块化协作,实现了:
任务级的抽象:用户只需关注"做什么",而非"怎么做"
仿真实体的统一:一套代码无缝切换虚拟与现实
积木式开发:通过元动作和序列动作快速构建复杂行为
资源智能化管理:自动调度计算资源,优化执行效率
7.1.5.2 平台核心价值重申¶
抽象化:将复杂的底层实现封装为简单的配置接口
标准化:建立统一的模块通信和数据格式标准
可复用:积累的配置和经验可以在不同项目间迁移
7.1.5.3 未来生态展望¶
模型市场:预集成更多SOTA算法模型,开箱即用
场景库:积累各行业典型应用场景模板
协作平台:支持多人在线协同开发任务流程
AI辅助:智能推荐最优任务配置和参数调优
7.1.6 常见问题与调试技巧¶
分享一些初学者常见的问题(如配置文件格式错误、模型路径不对等)和排查思路,提升课程的实用性。
| 错误现象 | 可能原因 | 解决方案 |
|---|---|---|
| 任务发布后没有响应&日志无报错 | ROS域id不一致 | 在docker-compose中配置相同的域id |
| 任务发布后没有响应 | curl发布过于紧凑 | 在容器启动后等待充分时间后发布 |
| 机械臂运动失败 | 可能是相机识别失败导致 | 确保相机与机械臂的一致性 |
| 视觉识别失败 | 相机话题数据异常 | 使用ros2 topic echo检查图像流 |
| 导航路径规划超时 | 地图坐标系不匹配 | 检查TF树完整性 |
附录:关键技术术语表¶
| 术语 | 定义 |
|---|---|
| DH 参数 | 描述机器人连杆坐标系关系的参数组,包含 a(连杆长度)、α(连杆扭角)、d(关节偏移)、θ(关节角) |
| SLAM | 同步定位与地图构建(Simultaneous Localization and Mapping),机器人通过传感器数据构建环境地图并确定自身位置 |
| 四元数 | 用于表示三维空间旋转的数学工具,相比欧拉角可避免万向节锁问题 |
| CUDA | 英伟达推出的并行计算平台和编程模型,可利用 GPU 进行通用计算 |
| TF 树 | 机器人坐标系转换树,用于维护不同坐标系之间的变换关系 |