模块四:自定义无人机接入与比赛资产说明
学习目标:
- 理解为什么不能只换一个 USD 文件。
- 知道自定义无人机需要 body、rotor、质量、惯量等结构。
- 掌握三种接入思路:Pegasus UI 注册、脚本加载、绑定已有
/World/quadrotor。
前置条件:
- 官方 Iris 已经能飞。
- ROS 2 Offboard 控制链路已经验证通过。
- 能区分问题出在 PX4、Pegasus、ROS 2 还是 USD 资产。
完成要求:
- 能加载比赛无人机资产。
- 能确认
/World/quadrotor路径。 - 能确认
/World/quadrotor/body路径。 - 能启动 PX4 backend。
- 能通过 QGC 或 ROS 2 控制比赛无人机。
01 自定义无人机接入条件
USD 能显示,不代表无人机能被 Pegasus/PX4 控制。要能飞,至少需要:
- 主机体 body。
- rotor prim。
- 合理的质量和惯量。
- 旋翼位置、方向、推力模型。
- 和 PX4 backend 匹配的 airframe / actuator 配置。
- 正确的 stage prim 路径。
- 如果需要传感器,还要挂载 camera、IMU 或其它传感器。
通常要准备:
| 内容 | 作用 |
|---|---|
| USD 资产 | 无人机外观、body、rotor、碰撞体、传感器位置 |
| 动力学参数 | 质量、惯量、旋翼位置、推力系数、力矩系数 |
| 车辆配置 | 告诉 Pegasus 如何创建 Multirotor |
| backend 配置 | 告诉 Pegasus 使用 PX4、ArduPilot 或自定义 backend |
| UI 注册 | 让 Pegasus UI 中可以选择该无人机 |
02 USD 资产结构要求
像 Iris 一样在 Pegasus UI 的 Vehicle Model 下拉框里选择自己的无人机,需要把资产放到 Pegasus 插件的资产目录:
<PegasusSimulator>/extensions/pegasus.simulator/pegasus/simulator/assets/Robots/远端容器常见路径:
xxxxxxxxxx/root/PegasusSimulator/extensions/pegasus.simulator/pegasus/simulator/assets/Robots/本机常见路径:
xxxxxxxxxx/home/robot-a/Documents/PegasusSimulator/extensions/pegasus.simulator/pegasus/simulator/assets/Robots/如果只用脚本加载,不需要出现在 Pegasus UI 中,也可以把 USD 放在自己的 assets/robots/ 下,然后在脚本里传入绝对路径或相对路径。
USD 的命名、层级和物理属性要符合 Pegasus 创建 Multirotor 的要求。也可以由脚本明确告诉 Pegasus 这些 prim 在哪里。满足这些条件后,外部 USD 资产才可能变成可控无人机。
03 Pegasus UI 注册新机型
Pegasus UI 的车辆列表来自插件源码中的 ROBOTS 字典。需要修改的文件是:
xxxxxxxxxx<PegasusSimulator>/extensions/pegasus.simulator/pegasus/simulator/params.py在这个文件里可以看到类似内容:
xROBOTS_ASSETS = ASSET_PATH + "/Robots"ROBOTS = { "Iris": ROBOTS_ASSETS + "/Iris/iris.usd", "Sunray150": ROBOTS_ASSETS + "/sunray150/sunray150.usda",}如果要新增 MyDrone,可以按这个思路加一项:
xxxxxxxxxxROBOTS = { "Iris": ROBOTS_ASSETS + "/Iris/iris.usd", "MyDrone": ROBOTS_ASSETS + "/MyDrone/my_drone.usda",}然后把 USD 和它引用的 mesh、材质、子层文件放到:
xxxxxxxxxxpegasus/simulator/assets/Robots/MyDrone/修改后需要重启 Isaac Sim,重新启用 Pegasus 插件。这样 UI 的 Vehicle Model 下拉框里才会出现新无人机。
Pegasus UI 加载车辆时会走 ui/ui_delegate.py。核心逻辑是根据 robot_key 从 ROBOTS 中取 USD 路径,然后调用 Multirotor(...) 创建无人机。也就是说,params.py 只解决“UI 能否选到资产”。无人机能否飞行,还取决于 USD 结构、动力学参数和 PX4 backend 是否匹配。
04 脚本加载无人机
换成自己的无人机时,通常要改:
| 配置 | 说明 |
|---|---|
DRONE_ASSET_USD | 指向新的无人机 USD |
DRONE_PRIM | 加载到 Isaac stage 的 prim 路径,常用 /World/quadrotor |
DRONE_BODY_PRIM | 机体刚体路径,通常是 ${DRONE_PRIM}/body |
| 传感器 prim 路径 | 如果你的无人机带传感器,需要同步修改对应路径 |
| spawn 配置 | 出生位置和姿态,可以放在脚本参数或配置文件里 |
加载脚本的核心思路是:
xxxxxxxxxxmultirotor_config = MultirotorConfig()mavlink_config = PX4MavlinkBackendConfig({ "vehicle_id": 0, "px4_autolaunch": True, "px4_dir": pg.px4_path, "px4_vehicle_model": pg.px4_default_airframe,})multirotor_config.backends = [PX4MavlinkBackend(mavlink_config)]Multirotor( config.DRONE_PRIM, str(config.DRONE_ASSET_USD), 0, list(spawn_world), list(orientation), config=multirotor_config,)这种方式适合单独加载无人机,也适合在简单场景里验证自定义 USD 能不能被 Pegasus 创建和控制。
05 绑定已有 /World/quadrotor
有时无人机已经写在某个 USD 文件里,不需要 Pegasus 再加载一次。这个 USD 加载后,stage 中已经存在:
xxxxxxxxxx/World/quadrotor这种情况下不能再调用 Multirotor(DRONE_PRIM, DRONE_ASSET_USD, ...) 重复加载,否则场景里可能出现两个无人机,或者 prim 路径冲突。正确做法是先加载 USD,让 /World/quadrotor 出现在 stage 中,再让 Pegasus 绑定这个已有 prim。
绑定已有 prim 的思路如下:
xxxxxxxxxxself.vehicle = Multirotor( DRONE_PRIM, "", 0, None, None, config=config, attach_existing=True,)参数含义:
| 参数 | 含义 |
|---|---|
DRONE_PRIM | 已经存在的无人机 prim,例如 /World/quadrotor |
usd_file="" | 不再新增引用 USD,因为资产已经在 stage 里 |
init_pos=None | 不再设置出生点,使用 USD 当前位姿 |
init_orientation=None | 不再设置出生姿态,使用 USD 当前姿态 |
attach_existing=True | 告诉 Pegasus 绑定已有 prim,而不是创建新 prim |
绑定已有 prim 前,先确认:
- 完整场景里无人机 prim 路径和
DRONE_PRIM一致。 - 机体、旋翼、关节等结构符合 Pegasus
Multirotor期望。 - 绑定前 stage 中已经能找到该 prim,不能在 USD 还没加载完时绑定。
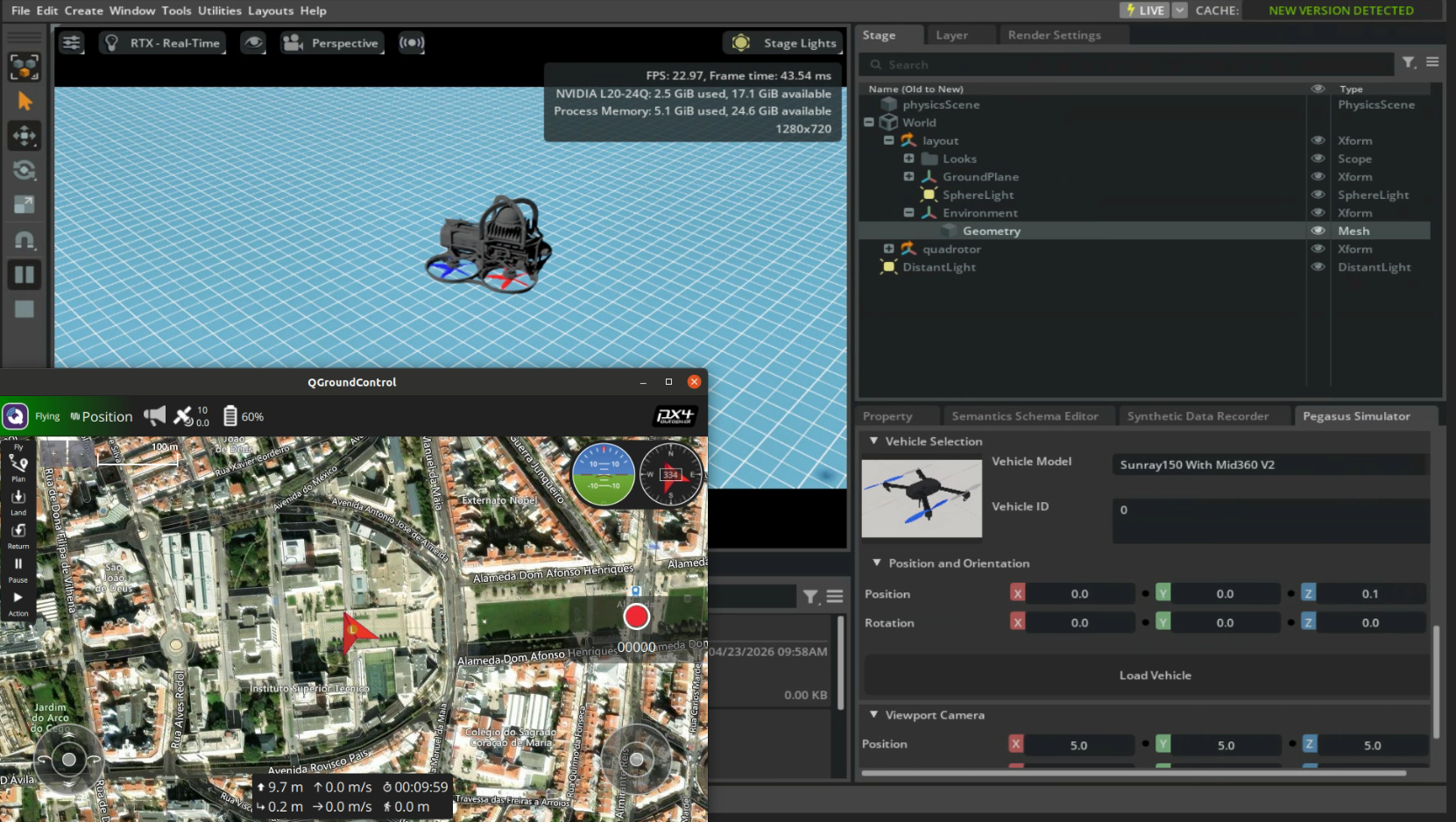
06 比赛无人机资产说明
| 项目 | 值 |
|---|---|
| 无人机 prim | /World/quadrotor |
| 机体 prim | /World/quadrotor/body |
| 无人机资产 | 本培训包中的 Sunray150 比赛无人机资产 |
| 资产入口 | assets/robots/sunray150_with_mid360_cargo/sunray150_with_mid360_cargo.usda |
当前仓库里的资产目录名来自原始建模文件。使用时将其作为比赛无人机示例资产即可,不需要关心旧项目任务逻辑。
Pegasus UI 中出现比赛无人机资产,说明 UI 至少已经识别到注册项或资产路径。
07 自定义机飞行问题排查
Iris 能飞,自定义机不能飞时,Pegasus、PX4、QGC 基础链路通常是通的。问题更可能在自定义机:
- USD prim 路径错误。
- body 或 rotor 命名不符合预期。
- 质量、惯量、碰撞体不合理。
- 旋翼方向或推力参数错误。
- PX4 airframe 和无人机模型不匹配。
- backend 配置没有绑定到该无人机。
Pegasus 不是“看到任何模型都能飞”。它需要能找到并绑定可控制的结构:
- 表示机体的刚体。
- 多个旋翼或 rotor prim。
- 旋翼相对机体的位置和方向。
- 动力学参数。
- backend 配置。
- 传感器或 frame 的挂载路径。
09 最终检查清单
基础环境:
Isaac Sim 能启动。
Pegasus 插件能在 Extensions 中看到并启用。
PX4-Autopilot 路径配置正确。
QGroundControl 能启动。
ROS 2 环境能 source。
px4_msgs已编译。Micro XRCE-DDS Agent 可运行。
官方 Iris:
Pegasus 能加载 Iris。
PX4 SITL 能启动。
QGC 能连接。
QGC 显示 Ready To Fly。
能 arm。
能 takeoff。
能通过摇杆或虚拟摇杆控制方向。
能 land。
ROS 2 Offboard:
能看到
/fmu/out/vehicle_local_position。能看到
/fmu/out/vehicle_status。能运行
run_control_menu.sh。能执行
takeoff 1.0。能执行
move 1 0 0。能 hover。
能 land。
自定义无人机:
能加载比赛无人机资产。
能确认
/World/quadrotor路径。能确认
/World/quadrotor/body路径。能启动 PX4 backend。
能通过 QGC 或 ROS 2 控制比赛无人机。
能判断问题出在 PX4、Pegasus、ROS 2 还是 USD 资产。