模块三:PX4 Offboard 与 ROS 2 代码控制
学习目标:
- 理解 PX4 local / NED 坐标系。
- 理解 ENU / NED、FLU / FRD 的区别。
- 能通过 ROS 2 话题控制 PX4 Offboard。
- 能使用控制菜单完成起飞、移动、悬停、降落。
前置条件:
- 官方 Iris 已经能通过 QGC 手动飞行。
- Ubuntu 20.04 + ROS 2 Foxy 环境、
px4_msgs、Micro XRCE-DDS Agent 安装完成。 - 能检索到
/fmu/out/*状态话题。
01 PX4 local / NED 坐标系
坐标系是无人机控制中常见的错误来源。飞机方向相反、高度不对,通常与坐标映射错误或 frame 不匹配有关。
常见坐标系:
| 坐标系 | 是否固定 | 含义 |
|---|---|---|
| world / map | 固定 | 场景或规划使用的世界坐标 |
| PX4 local | 固定 | PX4 本地位置控制使用的局部坐标,通常以 home/local origin 为原点 |
| body | 随无人机移动 | 无人机机身坐标,随姿态变化 |
| sensor frame | 随传感器移动 | 例如相机或其它传感器自己的坐标系 |
PX4 local 通常按 NED 理解:
PX4 local x: NorthPX4 local y: EastPX4 local z: Down控制时记住三点:
- 无人机上升时,PX4 local z 通常变得更负。
TrajectorySetpoint.position = [0, 0, -1]常表示飞到上方约 1 米。- 如果直接把 Isaac / map 的
z=+1.0发给 PX4,高度方向通常会错。
02 ENU / NED 与 FLU / FRD 转换
ENU:
xxxxxxxxxxx = East 东y = North 北z = Up 上NED:
xxxxxxxxxxx = North 北y = East 东z = Down 下ENU 和 NED 都是右手系,只是轴定义不同。不能把 NED 简单理解成左手系。
PX4 常用机体系是 FRD:
xxxxxxxxxxx = Forward 前y = Right 右z = Down 下ROS 常见机体系是 FLU:
xxxxxxxxxxx = Forward 前y = Left 左z = Up 上PX4 body 和 ROS body 的 y、z 方向不同。写桥接代码时别混用。
03 PX4 输入输出话题说明
ROS 2 控制 PX4 最常用的输入话题:
| 话题 | 作用 | 注意 |
|---|---|---|
/fmu/in/offboard_control_mode | 告诉 PX4 外部控制器控制位置/速度/姿态等 | 必须持续发布 |
/fmu/in/trajectory_setpoint | 发送 PX4 local 下的位置/速度/加速度/yaw setpoint | 坐标必须是 PX4 local/NED |
/fmu/in/vehicle_command | arm、disarm、切模式、land 等命令 | 通常需要重复或按时序发送 |
常用输出话题:
| 话题 | 作用 |
|---|---|
/fmu/out/vehicle_local_position | PX4 local 位置估计 |
/fmu/out/vehicle_local_position_v1 | 部分 PX4 / px4_msgs 版本里的 local position 话题 |
/fmu/out/vehicle_status | 飞行模式、解锁状态 |
/fmu/out/vehicle_status_v3 | 部分 PX4 / px4_msgs 版本里的 vehicle status 话题 |
04 Offboard 控制最小流程
ROS 2 控制 PX4 的基本流程如下:
xxxxxxxxxx1. 等待 PX4 local position 有效2. 持续发布 OffboardControlMode3. 持续发布 TrajectorySetpoint4. 发送 VehicleCommand 切换 Offboard5. 发送 VehicleCommand 解锁 arm6. 持续刷新 setpoint7. 到达目标后继续保持、降落或切换其他状态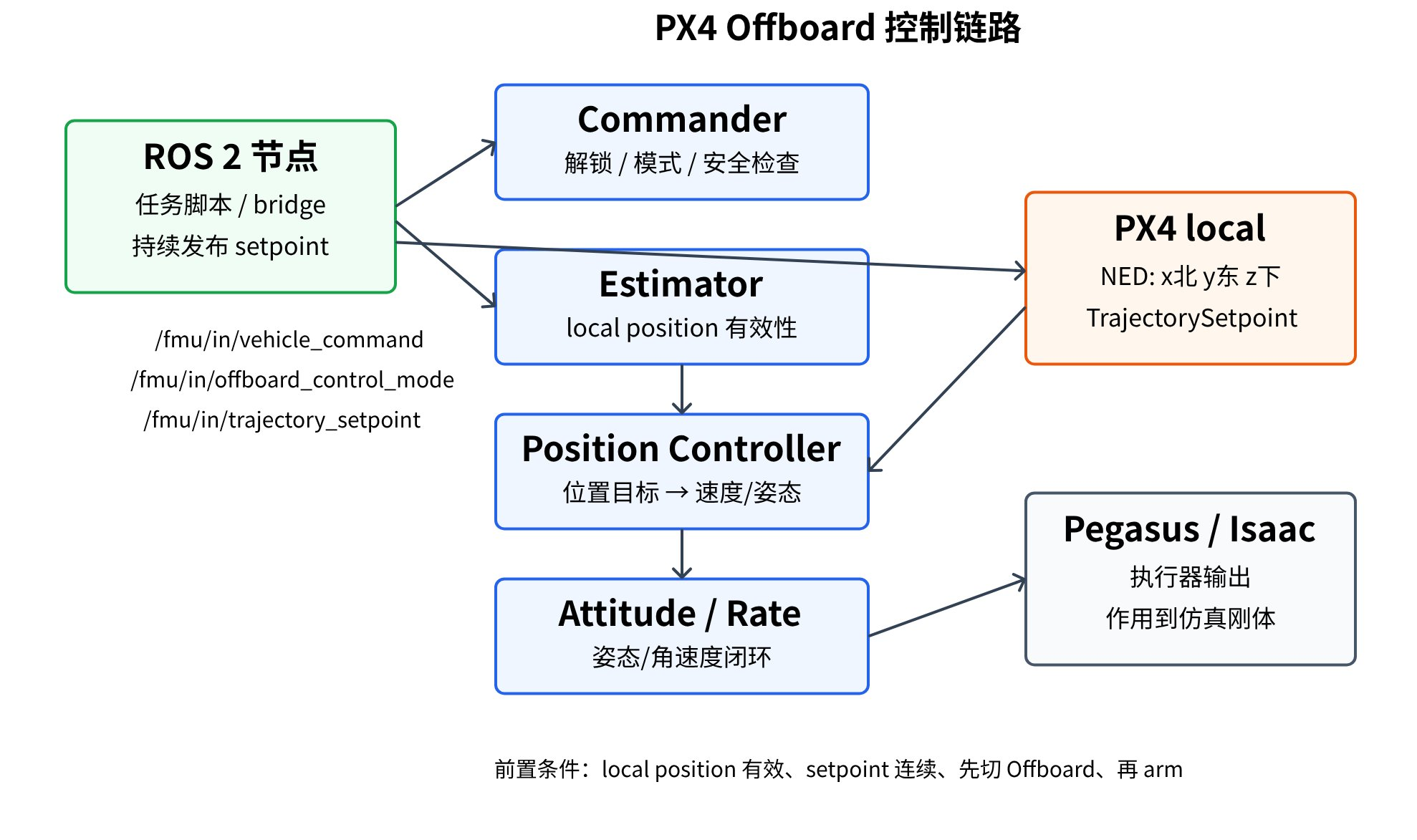
05 控制菜单使用
配套代码包默认放在桌面:
xxxxxxxxxx/home/robot-a/Desktop/drone_training_github_release里面主要有这些文件:
| 文件 | 作用 |
|---|---|
run_import_asset.sh | 用 Isaac Sim 执行导入脚本,加载比赛无人机资产,并启动 Pegasus PX4 backend |
isaac/import_sunray150_with_px4.py | Isaac Sim --exec 脚本,调用 Pegasus Multirotor 加载无人机 |
run_control_menu.sh | 启动 ROS 2/PX4 命令行控制菜单 |
control/px4_offboard_menu.py | 发布 /fmu/in/* Offboard 控制话题,订阅 /fmu/out/* 状态话题 |
使用前先确认 PX4 话题可见:
xxxxxxxxxxros2 topic list --no-daemon | grep /fmuros2 topic echo /fmu/out/vehicle_local_position --onceros2 topic echo /fmu/out/vehicle_local_position_v1 --once/fmu/out/vehicle_local_position 和 /fmu/out/vehicle_local_position_v1 只要有一个有数据,就说明 ROS 2 已经能读到 PX4 local position。
第一步,启动 Isaac Sim 并导入无人机:
xxxxxxxxxxcd /home/robot-a/Desktop/drone_training_github_release./run_import_asset.sh如果只是检查 USD 资产能不能加载,不想启动 PX4,可以用:
xxxxxxxxxx./run_import_asset.sh --no-px4-autolaunch常用参数:
xxxxxxxxxx./run_import_asset.sh --x 0 --y 0 --z 1.0./run_import_asset.sh --yaw-deg 90第二步,打开新终端启动控制菜单:
xxxxxxxxxxcd /home/robot-a/Desktop/drone_training_github_release./run_control_menu.sh进入菜单后,按下面顺序测试:
xxxxxxxxxxstatustakeoff 1.0statusmove 1 0 0hoverlandquit想快速验证控制链路,可以输入:
xxxxxxxxxxdemodemo 会自动执行:起飞 1m,等待进入 Offboard,然后把 PX4 local x 目标增加 1m。
菜单命令说明:
| 命令 | 作用 |
|---|---|
status | 显示 PX4 local position、当前目标点、解锁状态和飞行模式 |
takeoff 1.0 | 以当前位置为基准,上升约 1m,并切入 Offboard、发送 arm |
offboard | 如果无人机已经通过 QGC 起飞,先保持当前位置并切入 Offboard |
move 1 0 0 | 在当前目标点基础上,PX4 local x 增加 1m |
goto 0 0 -1.2 | 直接设置 PX4 local/NED 目标点 |
hover | 把当前位置设为目标点并保持 |
land | 发送 PX4 land 命令 |
注意:move 不是起飞命令。它只在 PX4 已经处于 OFFBOARD 模式后改变目标点。如果 PX4 仍在 AUTO_LOITER、POSCTL、MANUAL 等模式,脚本会提示先运行 takeoff 或 offboard。
控制菜单使用 PX4 local/NED 坐标:
xxxxxxxxxxx = Northy = Eastz = Down所以上升是 z 变小。比如:
xxxxxxxxxxtakeoff 1.0 # 目标 z = current_z - 1.0move 0 0 -0.2 # 在当前目标基础上再上升约 0.2mmove 0 0 0.2 # 在当前目标基础上下降约 0.2m如果脚本启动时报 Python 版本问题,通常是因为在 conda (base) 环境中运行了 ROS 2。run_control_menu.sh 默认使用 /usr/bin/python3,不应改成 conda 的 python3。
06 Python 控制代码讲解
下面只保留核心结构。实际代码还要处理 QoS、时间戳、状态检查和错误分支。
ximport rclpyfrom rclpy.node import Nodefrom px4_msgs.msg import OffboardControlMode, TrajectorySetpoint, VehicleCommandclass SimpleOffboard(Node): def __init__(self): super().__init__("simple_offboard") self.offboard_pub = self.create_publisher( OffboardControlMode, "/fmu/in/offboard_control_mode", 10 ) self.setpoint_pub = self.create_publisher( TrajectorySetpoint, "/fmu/in/trajectory_setpoint", 10 ) self.command_pub = self.create_publisher( VehicleCommand, "/fmu/in/vehicle_command", 10 ) self.timer = self.create_timer(0.05, self.tick) self.count = 0 def tick(self): now = int(self.get_clock().now().nanoseconds / 1000) mode = OffboardControlMode() mode.timestamp = now mode.position = True self.offboard_pub.publish(mode) sp = TrajectorySetpoint() sp.timestamp = now sp.position = [0.0, 0.0, -1.0] # PX4 local / NED: z=-1 表示向上约 1m sp.yaw = 0.0 self.setpoint_pub.publish(sp) if self.count == 20: self.set_offboard() self.arm() self.count += 1 def send_command(self, command, param1=0.0, param2=0.0): msg = VehicleCommand() msg.timestamp = int(self.get_clock().now().nanoseconds / 1000) msg.command = command msg.param1 = float(param1) msg.param2 = float(param2) msg.target_system = 1 msg.target_component = 1 msg.source_system = 1 msg.source_component = 1 msg.from_external = True self.command_pub.publish(msg) def set_offboard(self): self.send_command(VehicleCommand.VEHICLE_CMD_DO_SET_MODE, 1.0, 6.0) def arm(self): self.send_command(VehicleCommand.VEHICLE_CMD_COMPONENT_ARM_DISARM, 1.0)def main(): rclpy.init() node = SimpleOffboard() rclpy.spin(node) node.destroy_node() rclpy.shutdown()07 自动起飞、移动、悬停、降落
如果目标已经在 PX4 local/NED 坐标里:
x增大:向 North。x减小:向 South。y增大:向 East。y减小:向 West。z减小:向上。z增大:向下。
不能把“前进”直接等同于 PX4 local x 增大。前进通常指 body forward,它和世界系/PX4 local 的关系取决于当前 yaw。
控制菜单示例:
xxxxxxxxxxstatustakeoff 1.0move 1 0 0move 0 1 0move 0 0 -0.2hoverland08 Offboard 常见问题排查
Offboard 不起飞一般先查这些:
- 没有持续发布
OffboardControlMode。 - 没有持续发布
TrajectorySetpoint。 - 还没发送 setpoint 就切 Offboard。
- local position 无效。
- 没有 arm 成功。
- setpoint 的 z 方向错了。
飞行方向反了,优先检查:
- 目标点是在 map/ENU 还是 PX4 local/NED。
- 是否把 z 上直接发给了 PX4 z 下。
- 是否需要 x/y 交换。
- 是否把 body 前进误认为 local x 方向。
ROS 2 控制检查清单:
能看到
/fmu/out/vehicle_local_position。能看到
/fmu/out/vehicle_status。能持续发布
/fmu/in/offboard_control_mode。能持续发布
/fmu/in/trajectory_setpoint。能发送
/fmu/in/vehicle_command。能切入 Offboard。
能 arm。
能按目标点移动。