第三章:Isaac Sim 关节控制与 ActionGraph¶
在前序内容中,我们已经完整介绍了Bobac全向底盘的真实硬件结构、轮系布局、关节机械参数,同时我们已经提供了可直接在IsaacSim加载运行的机器人仿真模型。
在实体机器人上,控制器通过驱动器输出电信号驱动关节运转;对应到仿真环境中,则需要通过软件下发控制指令,实现仿真关节的运动控制。整车底盘的行进、横移、自转,全部依靠各个车轮关节的受控旋转实现,因此本章我们聚焦学习IsaacSim环境下的机器人关节控制方案。
关节控制本质是闭环反馈控制:依靠期望状态与实际关节状态的偏差,通过控制算法计算驱动指令。IsaacSim依靠Articulation Controller内置PD算法完成力矩解算,最终交由PhysX完成物理运算。想要下发控制指令,最便捷的可视化工具就是ActionGraph,接下来我们就从ActionGraph入手,循序渐进完成:固定数值控制单关节→ROS2远程动态控关节→全向底盘整车控制的全流程实操。
3.1 控制基础 (理论可选读)¶
3.1.1 什么是控制¶
控制是使系统变量符合某个期望值(称为参考值)的过程。过程如下图所示
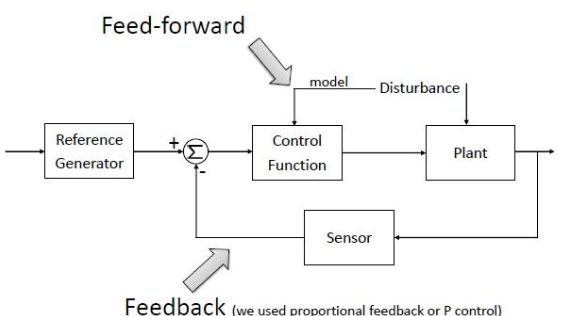
在这个控制过程中,包含了前馈(Feed Forward)和反馈(Feed Back)过程;
前馈部分:
反馈部分:
常见的控制方式分为 开环控制(Open-loop control)与闭环控制(Closed-loop control)两种。
这两种控制方法最主要的不同就在于是否包含有反馈的过程
3.1.1.1 开环控制¶
开环控制就是在进行一个控制任务的时候,机器人移动的输出并不会反过来影响到机器人的输入,即下达一个指令,这个指令让机器人到达某个位置,而这个指令下达给机器人过后,机器人开始任务过后,这个指令就并不会重新影响机器人的输入,机器人就一直都是这个输入,没有变化,也没有微调
控制流程如下:
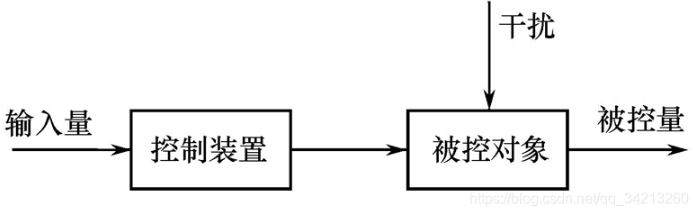
单纯使用开环控制在不讲求精度的情况下是可行的,但是如果讲求精度高的情况下就会有点不合理,因为在机器人运行的过程中,并没有进行微调,如果机器人运行的环境对机器人有所影响,就会导致机器人运行的结果不符合要求
3.1.1.2 闭环控制¶
闭环控制就是在进行一个控制任务的时候,机器人的输入将不再是一个恒定的输入,他将会根据机器人的输出与目标的偏差进行调整
控制流程如下
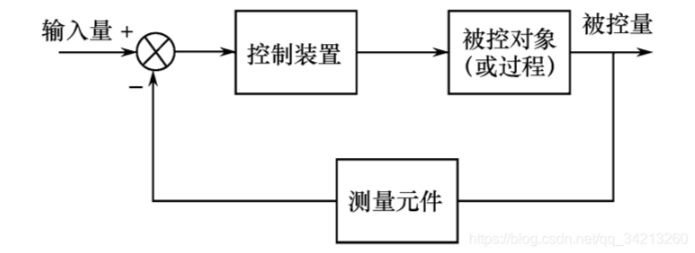
在该流程中:
- 「输入量」是我们设定的目标值(如关节目标角度/速度);
- 「被控对象」是机器人关节或机构;
- 「测量元件」会实时采集机器人的实际输出(关节当前角度/速度);
- 系统会计算目标值与实际值的偏差,并反馈给「控制装置」,由控制装置根据偏差调整控制信号,形成完整的反馈回路。
在 Isaac Sim 中,机器人关节的闭环控制正是基于这一原理实现的,核心控制器为 ArticulationController。它本质上是一个基于 PD 控制算法的闭环控制器:通过关节传感器(对应框图中的“测量元件”)获取当前状态,与目标状态做差得到偏差,再由PD算法计算控制输出,驱动关节运动到指定位置或保持指定速度。
3.1.1.3 PD 控制器¶
PD 控制器的核心工作原理,是将比例(P)控制与微分(D)控制结合,兼顾响应速度与系统稳定性,是 Isaac Sim 中ArticulationController的核心控制算法。
4.1.1.3.1 P 控制器(比例控制)¶
P 控制器是最基础的闭环控制方式,它将控制输出与误差值之间建立线性关系:
$$ 控制值= P* Err $$
其中公式中的 P(比例值) 一般记为 $ K_p $, $ K_p $ 值越大,控制值与误差值之间的比例关系也就越大,控制的相应速度也就越快,但是比例关系越大,在接近目标的时候,产生的震荡也越严重
3.1.1.3.2 D 控制器(微分控制)¶
D 控制器通过引入误差的变化率来抑制系统震荡,利用微分的 “超前作用” 提前预判误差变化趋势,抵消 P 控制带来的超调问题。当目标值与当前值的误差值越小的时候由于微分值会越小,进而调整具体的控制量,来减小P控制器产生的震荡。
D 控制器的数学表达式如下: $$ 控制值= K_D \cdot \frac{d(Err)}{dt} $$
其中:
$K_D$是微分增量,它决定了误差变化率对控制输出的影响程度。
$ \frac{de(t)}{dt} $是误差的变化率
通常情况下,增大微分增益D可以提高系统的稳定性,但如果设置过大可能导致系统响应过慢甚至产生过冲。
3.1.1.3.3 PD 控制器 (比例-微分控制)¶
将 P 控制与 D 控制结合,就得到了 PD 控制器,它同时兼顾了快速响应与震荡抑制,是关节位置 / 速度控制中最常用的基础算法之一。
PD 控制器的完整公式为:
$$ \text{控制值} = K_p \cdot Err + K_D \cdot \frac{d(Err)}{dt} $$
3.1.1.4 IsaacSim 中的 PD 控制器¶
经典算法基于同一套误差$Err$分别生成比例项、微分项,计算后的控制量可直接驱动被控关节。但IsaacSim底层依托PhysX物理引擎开发,引擎在关节驱动接口上将控制输入拆分为position(目标位置)、velocity(目标速度)两组完全独立变量,原有一体式PD公式无法适配该解耦式接口规范,因此IsaacSim内嵌在Articulation Controller(多体关节控制器)内部的PD算法被重构为分离式结构,实际仿真中依靠Articulation Controller完成全流程关节控制,具体如下:
控制目标:¶
- 位置控制(position变量):以关节期望位置为基准,依靠实际位置与目标位置的偏差生成比例控制力,实现关节定点位置伺服;
- 速度控制(velocity变量):以关节期望运动速度为基准,依靠实际速度与目标速度的偏差生成阻尼控制力,抑制运动超调与震荡。
- $K_{Stiffness}$:位置刚度系数,等效经典PD的比例系数$K_p$,用于调节位置响应快慢;
- $K_{Damping}$:速度阻尼系数,等效经典PD的微分系数$K_D$,用于抑制运动震荡;
- $p_{目标位置}/p_{实际位置}$:对应position独立变量,分别为关节期望位置、仿真实时采集的实际关节位置;
- $v_{目标速度}/v_{当前速度}$:对应velocity独立变量,分别为关节期望转速、仿真实时采集的实际关节速度;
- $F_p$:位置误差生成的比例控制力,$F_d$:速度误差生成的阻尼控制力,$F_{total}$为本级PD控制器最终输出合力。
补充说明:当前提供资产的damping 和 stiffness 已经调整完毕,若在控制的过程中,效果不合预期,可尝试自行调整 damping 和 stiffness 参数,详细参数配置说明可查阅官方文档:Gain Tuning(增益调节)
设计逻辑说明:经典PD共用同一个误差信号$Err$拆分P、D项,而Isaac受引擎接口限制,位置环、速度环相互独立,因此将原PD的比例、微分运算拆分为两路独立计算: $$ \begin{cases} F_p = K_{Stiffness}\cdot(p_{目标位置}-p_{实际位置}) \\ F_d = K_{Damping}\cdot(v_{目标速度}-v_{当前速度}) \\ F_{total}=F_p+F_d \end{cases} $$ 式中参数对标上一节通用PD:
关键概念:IsaacSim中PD仅作为【前处理模块】¶
补充载体说明:IsaacSim 不存在单独、独立的PD控制器组件。所有机器人关节的PD控制功能,全部集成在 Articulation Controller(多体关节控制器) 内部。为适配 PhysX 物理引擎 position、velocity 相互独立的接口规范,Articulation Controller 内部内置了这套分离式PD算法,专门用于前置求解控制量。
从控制表现层面来看,Articulation Controller 通过内部的分离式PD算法完成位置、速度误差解算,计算得到关节控制力,从而实现机器人关节的伺服控制。这一点和经典PD控制效果相似,但底层运行逻辑存在本质区别:经典PD算法计算出控制量后可以直接驱动被控对象,而 IsaacSim 中 PD 计算得到的总控制力 $F_{total}$ 仅作为 PhysX 引擎的输入参数,只负责控制指令的前置换算,不具备直接驱动关节的能力;关节真实的刚体动力学求解、最终运动状态解算,全部由下游 PhysX 物理引擎完成。
下游:PhysX 双驱动模式与求解器配置¶
在 IsaacSim 中,关节驱动配置与求解器配置为两套相互独立的设置,二者不会自动关联,需要分别进行配置:
1. 关节驱动模式选择(通过 Articulation Controller 配置)¶
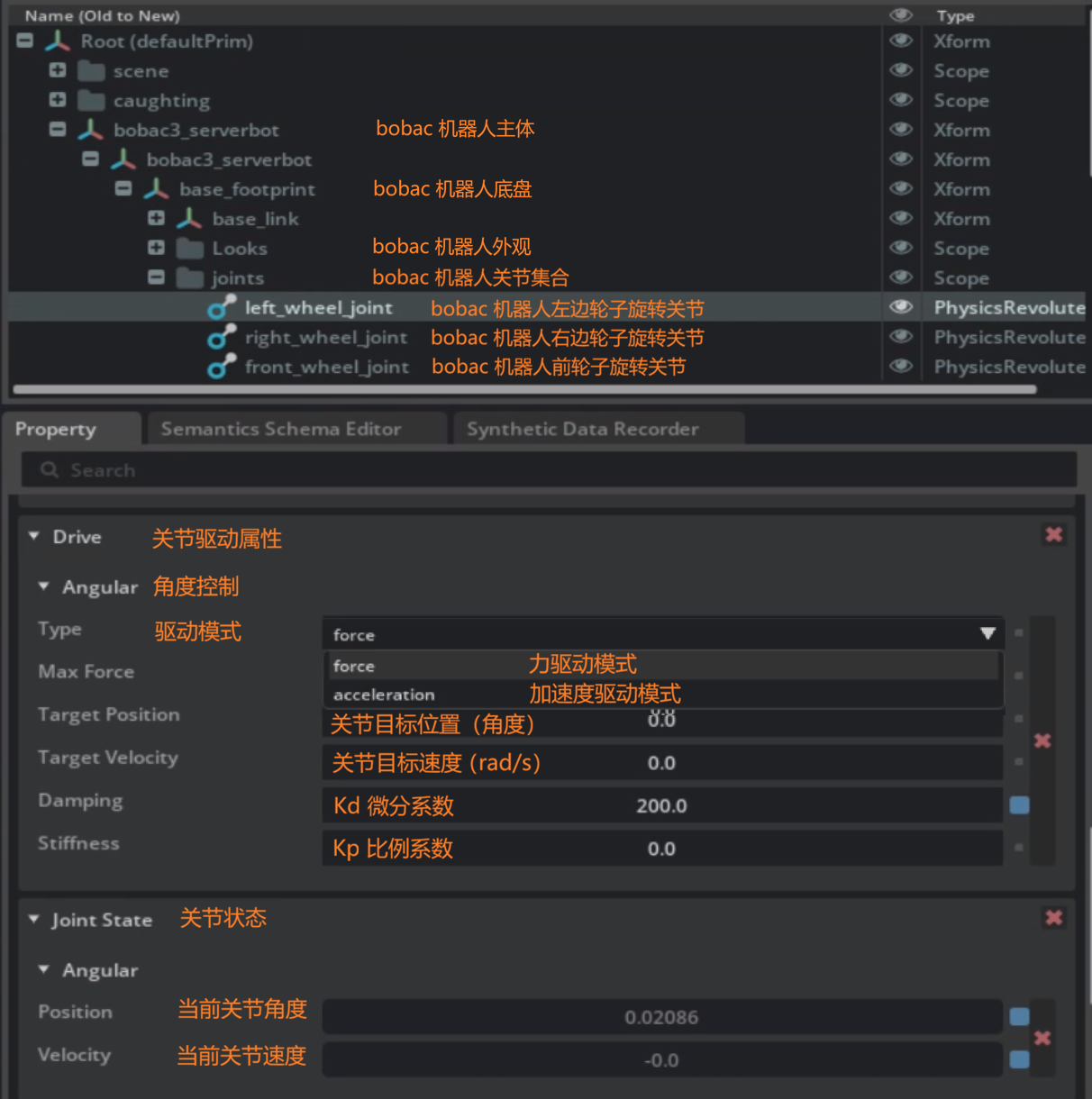
可在 Articulation Controller 中选择对应的关节驱动方式,决定 PD 输出力 $F_{total}$ 的解析与使用形式:
Force(力驱动模式) 将 PD 计算输出的 $F_{total}$ 作为外力约束,结合牛顿动力学 $F=ma$ 求解关节瞬时加速度,再通过数值积分计算出关节速度,适配常规低刚度串联机器人仿真场景,整体稳定性更好。
Accelerate(加速度驱动模式) 先通过公式 $a_{des}=F_{total}/m$ 将 PD 输出力换算为目标加速度,以加速度为约束条件完成求解,适配高刚度、高速往复运动的机器人仿真场景,算力消耗更低。
如下图所示:
注意:Force 与 Accelerate 两种驱动方式均可以正常控制关节运动,不会影响基础控制效果。二者的核心区别是 PhysX 物理引擎求解运算时使用的计算公式不同,在仿真鲁棒性、数值表现上存在细微差异。
2. 求解器类型选择(通过 physicsScene Prim 手动配置)¶
PGS、TGS 求解器不会随关节驱动模式自动切换,需要在场景的 physicsScene Prim 中手动设置,用于统一控制 PhysX 引擎的整体数值求解策略:
如下图所示:
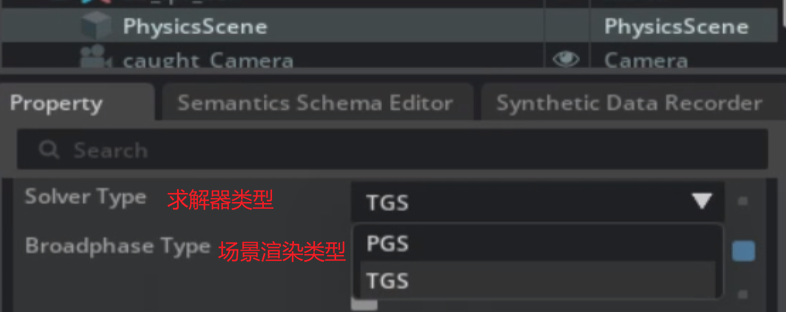
- PGS(投影高斯-赛德尔)求解器 迭代计算步骤完整,求解收敛性好、精度更高,适合对仿真精度有要求的低刚度系统,是 IsaacSim 的默认求解器。
- TGS(截断高斯-赛德尔)求解器 截断冗余的迭代步骤,减少仿真算力开销,在保证基本稳定性的前提下提升仿真速度,适合高刚度结构、大规模仿真场景。
配置路径参考:在 USD 场景中找到 /physicsScene Prim,通过属性面板修改 solverType 参数即可切换求解器(0=PGS,1=TGS);也可通过 Python API 调用 SimulationManager.set_solver_type() 方法进行设置。
求解器输出说明:无论选择哪种关节驱动方式与求解器类型,PGS、TGS 求解器完成迭代计算后,都会输出关节的控制运动速度(角速度/线速度)。PhysX 引擎根据该速度刷新关节与刚体的位姿状态,最终实现对机器人关节的完整控制。
拓展查阅:PGS、TGS求解器底层迭代原理可参考IsaacSim官方技术文档:PhysX 关节控制求解器原理文档
IsaacSim完整闭环控制链路汇总¶
flowchart LR A[输入期望position/velocity指令] --> B[Articulation Controller调用内置PD] B[分别计算位置误差、速度误差] --> C[Isaac分离式PD前处理,输出总控制力F_total] C --> D[在Articulation Controller中选定Force/Accelerate驱动类型] D --> E[PhysX自动匹配PGS/TGS求解器] E --> F[求解器迭代→输出关节实际运动速度] F --> G[PhysX刷新关节与刚体位姿] G --> H[仿真采集当前p_实际位置、v_当前速度,反馈至误差计算端] H --> B
3.2 基于 Action Graph 与 ROS2 的机器人关节控制(实操必读)¶
在前面的学习,我们已经了解了 IsaacSim 中关节控制的底层核心原理:依靠 Articulation Controller 内置的分离式 PD 算法完成控制量解算,再通过 PhysX 驱动模式与求解器完成最终的关节运动控制。
但在实际仿真与机器人开发中,我们并不会手动修改参数实现控制,而是需要通过外部通信的方式,向 IsaacSim 发送控制指令,进而驱动机器人关节运动。
在 IsaacSim 中,官方提供了Action Graph 可视化编程工具,它可以快速搭建数据流转与控制逻辑,直接对接底层的 Articulation Controller 控制器;同时结合常用的 ROS2 机器人操作系统,实现外部节点与 IsaacSim 仿真环境的数据交互。
接下来,我们将学习如何创建 Action Graph 逻辑流,并完成 ROS2 与 IsaacSim 的通信对接,最终实现通过外部指令精准控制机器人关节运动的完整实操流程。
3.2.1 Action Graph 基础理论(可选读)¶
3.2.1.1 什么是 ActionGraph¶
ActionGraph 是 Isaac Sim 提供的可视化编程工具,允许用户通过拖拽节点和连接的方式构建逻辑流程,无需编写代码即可实现复杂的机器人控制。
特点:
- 可视化编程,直观易懂
- 丰富的节点库,开箱即用
- 实时执行,即时反馈
- 模块化设计,易于复用
3.2.1.2 ActionGraph 的四大节点组成¶
控制链路固定时序:事件触发(On Tick) → 输入节点 → 处理节点 → 输出节点
graph LR
A[输入节点
Input Nodes] --> B[处理节点
Processing Nodes]
B --> C[输出节点
Output Nodes]
D[事件触发
On Tick] --> A
style A fill:#ccffcc
style B fill:#ffffcc
style C fill:#ffcccc
style D fill:#ccffff
- 事件节点:仿真帧触发执行(On Tick、On Impulse Event),整条控制流的运行开关
- 输入节点:数据来源(Constant常量、ROS2 Subscribe、Get Prim Attribute)
- 处理节点:数值运算(Math、Logic、Array),按需做数据换算
- 输出节点:下发指令(Set Articulation Joint Target、ROS2 Publish),对接底层控制器
3.2.2 实操一:纯ActionGraph固定常量控制单个底盘关节(无ROS)¶
教学目标:搭建最简可视化控制链路,打通数据流向:固定数值 → ActionGraph → ArticulationController → PhysX物理求解 → 车轮运动;逐个拆解所用节点功能,串联上一节关节PD控制与PhysX驱动底层原理。
3.2.2.1 案例所用节点介绍¶
本案例采用3个基础节点,覆盖「事件触发-数据输入-指令输出」完整链路,无需运算处理类节点:
| 节点名称 | 节点分类 | 具体作用 |
|---|---|---|
| On Playback Tick | 事件触发节点 | 跟随仿真帧周期持续输出执行脉冲,每一仿真步触发一次后续控制逻辑,是整个控制流的运行时钟 |
| Constant Double | 输入数据源节点 | 手动配置固定双精度浮点数值,作为车轮期望目标转速,是本套控制逻辑的指令来源 |
| Constant Token | 输入数据源节点 | 手动配置固定的字符串类型的关节名字,指定控制关节树种具体的哪个关节 |
| Articulation Controller | 输出执行节点 | 对接机器人Articulation资源,调用底层ArticulationController接口,下发关节位置/速度目标指令 |
| Make Array | 合并数组节点 | 由于 ArticulationController 的速度指令以及控制关节的接口都是需要以 数组 的类型传入,因此使用该节点将指令转为数组格式 |
整体信号逻辑:脉冲信号控制指令下发时机,Constant数据信号控制关节指令。
3.2.2.2 Action Graph 分步搭建操作¶
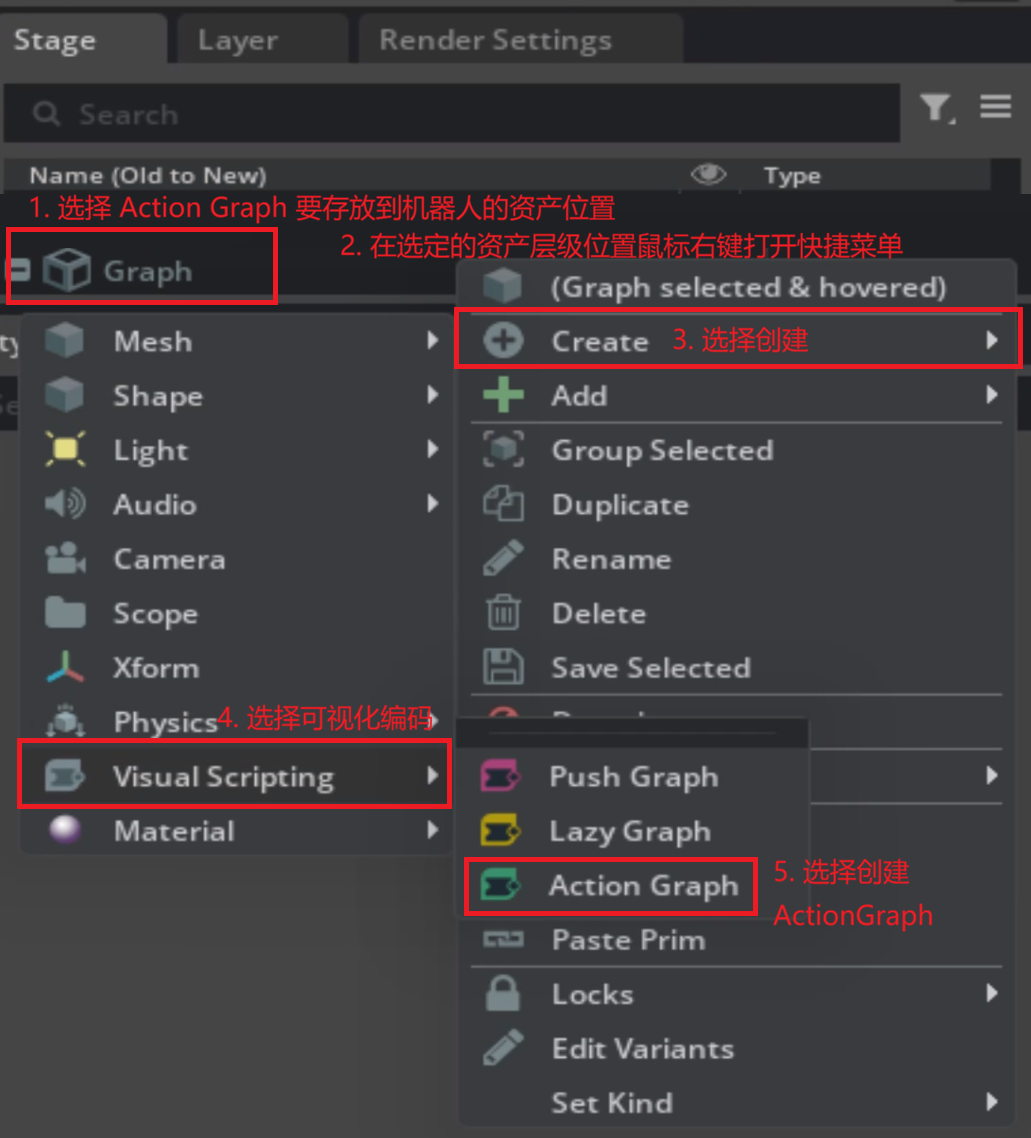
- 新建工程画布 打开Isaac Sim Action Graph编辑器,创建空白Graph
 或
或 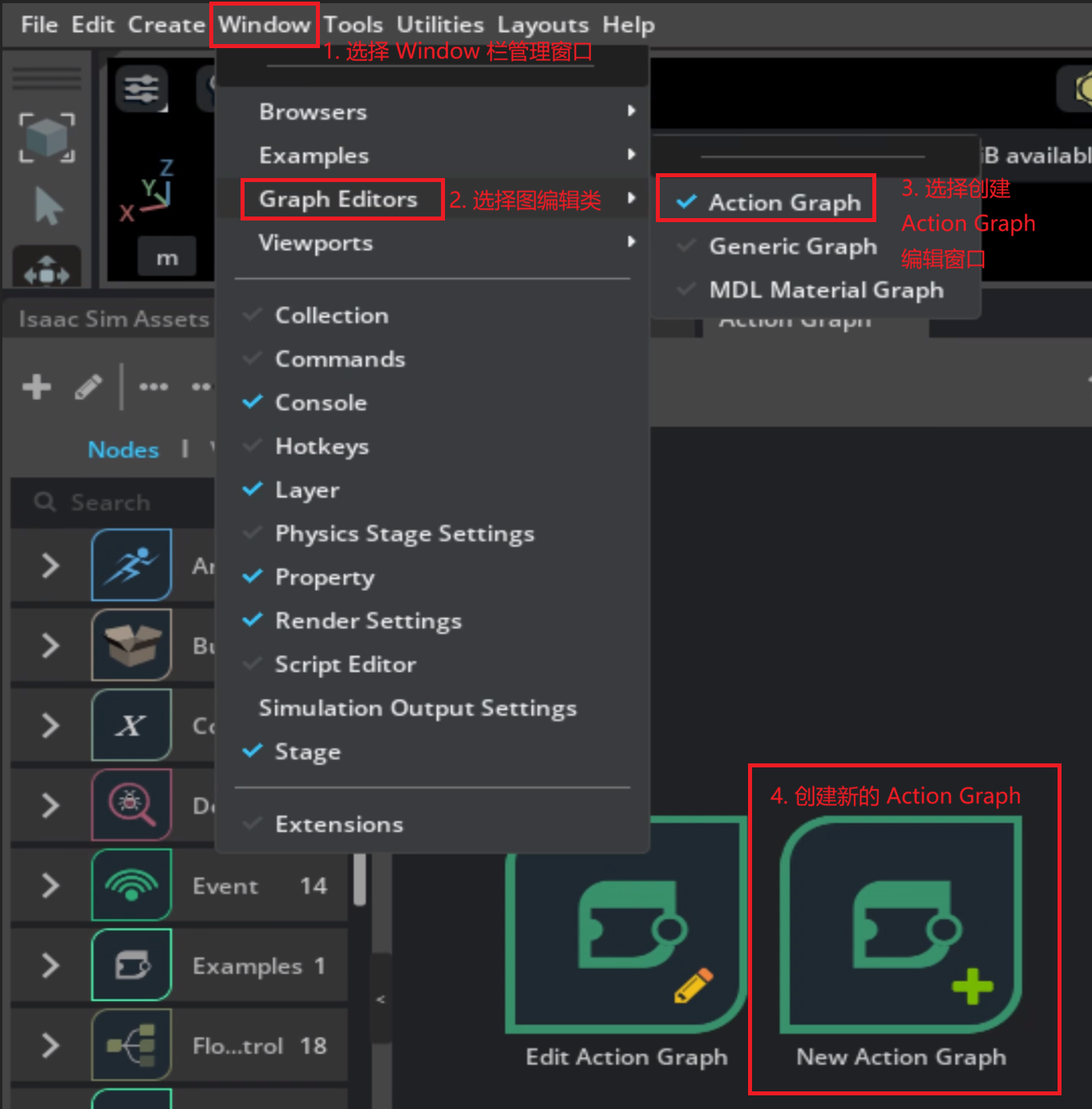
- 拖拽节点至编辑区
在节点检索框分别搜索 On Playback Tick、Constant Double、Constant Token、Make Array、Articulation Controller,拖拽至画布合适位置并连接起来。

逐个配置节点参数
- Constant Double:
Value参数填写固定转速,示例:20.0(单位:rad/s); - Articualtion Controller :
- Target Prim:选定指定要控制的关节,该选项在选择不同的 Prim 时会有不同的效果:
- 当传入的是 机器人关节树的根节点(Articulation Root) 时
- 当
jointName不为空时,Articulation Controller 会从关节树中以关节根节点为起点开始搜索**,找到与 jointName选项中名字一致的关节后将经过 PhysX 计算的速度值使用到指定关节中; - 当
jointName为空时,则将控制关节树中所有的关节执行相同的控制指令
- 当传入的值 机器人关节树中的关节 时
- 当
jointName选项没有值的时候,则将直接控制该关节, - 当
jointName选项有值时,则会自动寻找 target_prim 中关节的关节树根节点,并开始查找 jointName 选项中的指定关节,并进行控制
- Target Prim:选定指定要控制的关节,该选项在选择不同的 Prim 时会有不同的效果:
- Constant Double:
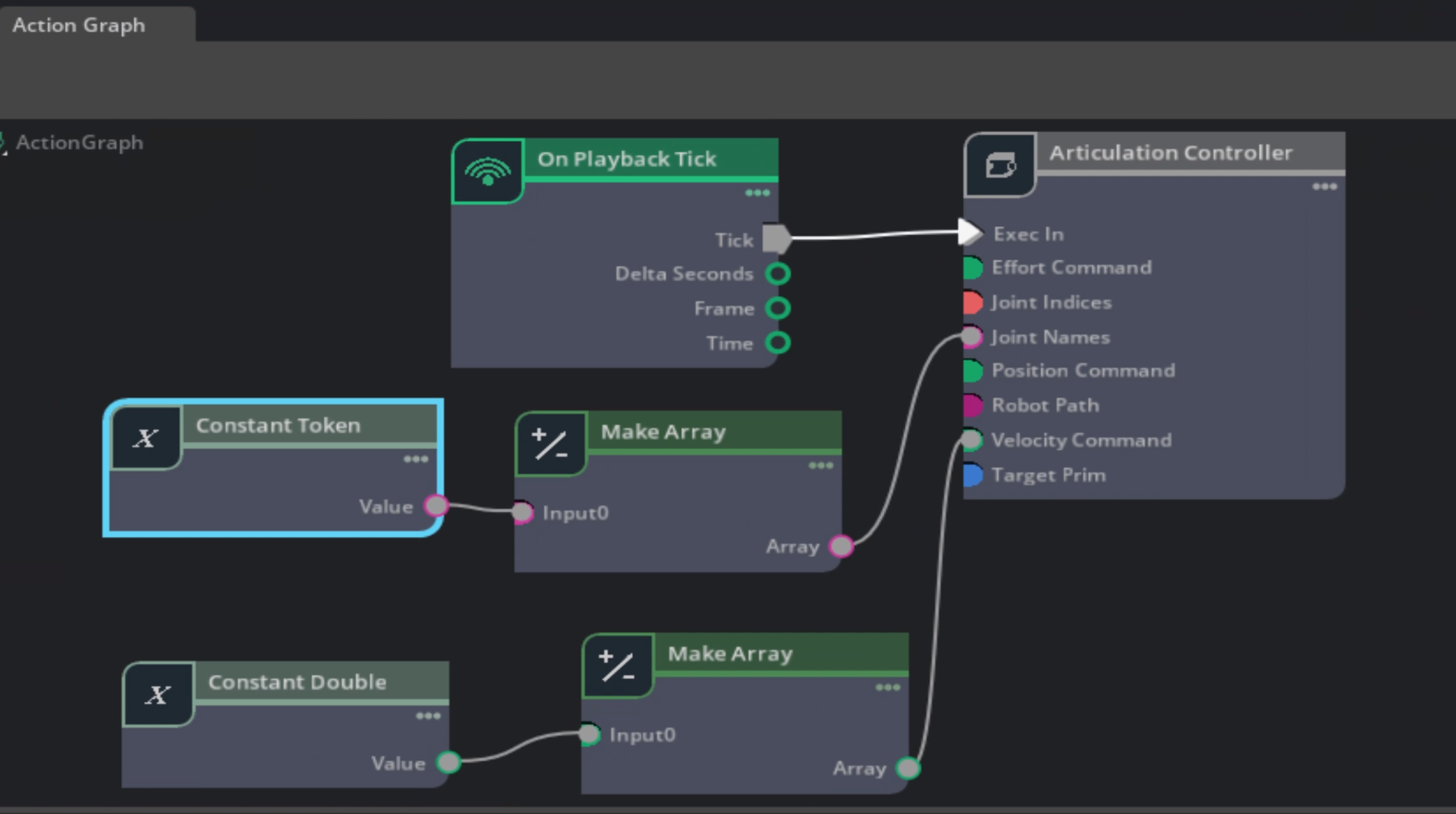
节点引脚连线
- On Playback Tick 脉冲输出引脚 → Articulation Controller 的 Exec In(执行)引脚;
- Constant Double 数值输出引脚 → Make Array → Articulation Controller 的 Velocity Command(目标值)引脚。
- Constant Token 数值输出引脚 → Make Array → Articulation Controller 的 JointNames 引脚
连接完毕后图如下:
- 仿真验证
保存当前Graph配置,点击仿真启动,被选中的车轮以恒定速度持续旋转(上面展示的时候,途中有卡顿是因为 On Playback Tick 是周期性的执行,在仿真的时候并不会在每一个物理周期时都有速度,因此就会出现在这种卡卡的现象)。
3.2.2.2.1 上面 Articulation Controller 中说的关节树是什么东西?关节树是怎么来的,作用是什么?为什么需要关节树呢?(知识补充,可选读)¶
实操中Articulation Controller查找关节、PhysX动力学运算全都依托关节树,下面精简介绍关节树相关知识点。
一、关节树是怎么来的?
我们在 Isaac Sim 中使用的机器人模型(三轮全向底盘、机械臂等),原始模型文件为 URDF/Xacro 格式,文件中会清晰定义:机器人的底座、车轮、连杆等刚体部件,以及连接这些刚体的转动关节、移动关节,同时标注了部件之间的父子层级关系。
当模型导入 Isaac Sim 后,引擎会自动解析这些结构,生成一个以 Articulation Root(关节根节点) 为顶层、所有刚体和关节为子节点的单向树形层级结构,这就是 关节树。PhysX 物理引擎会将这棵树封装为一个整体的多体动力学对象,用于统一管理和计算。
二、核心作用
- 整合零散刚体与关节,划定单台机器人边界;
- 约束机械结构,实现连杆间运动耦合;
- 支撑控制器通过关节名/索引快速定位被控关节;
- 作为PhysX多体动力学求解的计算骨架。
三、存在的必要性
若无关节树,底盘、车轮为互不关联的独立刚体,关节约束失效、部件散架,控制器无法检索关节,ROS与ActionGraph下发的控制指令全部失效。
3.2.3 实操二:ROS2+ActionGraph实现外部动态控制单个关节¶
在上一小节中,我们通过 Constant 常量搭配 Action Graph 完成了单个车轮的固定转速控制,但该方案存在明显短板:控制转速被硬编码在 Constant 节点中,仿真运行期间无法实时修改目标速度,想要调整车轮转速只能停止仿真、修改参数后重新启动,无法满足实际机器人调试与工程开发需求。在真实的机器人项目里,我们往往需要在仿真运行过程中,依靠外部程序、上位机、导航算法随时下发动态控制指令,灵活更改关节运动速度。而 ROS2 是机器人领域通用的标准化通信框架,依托ROS2 Subscribe通信节点替换固定常量数据源,就可以通过外部终端或自定义程序远程实时下发控制指令,因此接下来,我们尝试通过 ROS2 的方式与 Action Graph 进行通讯,进而能过用外部程序下非固定的控制指令
教学目标:替换上一案例固定Constant Double常量输入源,改用ROS2 Subscribe Joint State节点接收ROS2话题数据,打通完整数据流向:ROS2终端发布话题数据 → ROS2订阅节点 → ActionGraph → ArticulationController → PhysX物理求解 → 车轮动态变速运转;逐个理解新增ROS系列节点功能,掌握IsaacSim与外部ROS2进程的通信对接逻辑,实现仿真运行中远程实时修改车轮转速。
3.2.3.1 案例所用节点介绍¶
本案例在原有控制链路基础上,使用ROS通信节点替代常量数据源,整体依旧遵循「事件触发-ROS环境初始化-消息输入-指令输出」链路,无需额外Make Array数组拼接节点:
| 节点名称 | 节点分类 | 具体作用 |
|---|---|---|
| On Playback Tick | 事件触发节点 | 跟随仿真帧输出执行脉冲,周期性驱动整条ROS订阅与控制逻辑,作为全链路运行时钟(后续可替换为On Tick解决车轮卡顿问题) |
| ROS2 Context | ROS环境初始化节点 | 初始化ROS2通信上下文、配置Domain域ID,是所有ROS订阅/发布节点的依赖基础,同一个工程内所有ROS节点共用一套Context |
| ROS2 Subscribe Joint State | ROS消息输入数据源节点 | 订阅用户自定义的ROS2话题,接收外部终端发布的JointState格式消息;内部自动拆分消息,分别向外输出关节名称数组、目标速度数组,原生适配ArticulationController引脚格式,省去Make Array数组封装步骤 |
| Articulation Controller | 输出执行节点 | 对接机器人Articulation资源,沿用底层PD控制逻辑,接收ROS解析后的关节名与速度指令,调用底层接口下发目标值至PhysX引擎 |
整体信号逻辑:On Playback Tick脉冲控制订阅、指令下发时机;ROS2 Context提供通信环境;ROS订阅节点解析话题数据,拆分后直接送入控制器完成关节驱动。
3.2.3.2 Action Graph 分步搭建操作¶
- 新建/复用ActionGraph画布 可在上一节固定值控制工程基础上修改,或新建空白Action Graph编辑器工程。
拖拽节点至编辑区 在节点检索框分别搜索
On Playback Tick、ROS2 Context、ROS2 Subscribe Joint State、Articulation Controller,拖拽至画布合适位置。
逐个配置节点参数
ROS2 Context:按需填写
Domain Id,固定ROS通信域;ROS2 Subscribe Joint State:
Topic Name:自定义ROS话题名称,示例:/single_wheel_joint(后续终端发布话题必须和该名称保持一致);
Articulation Controller :
- Target Prim配置规则和上一节完全一致
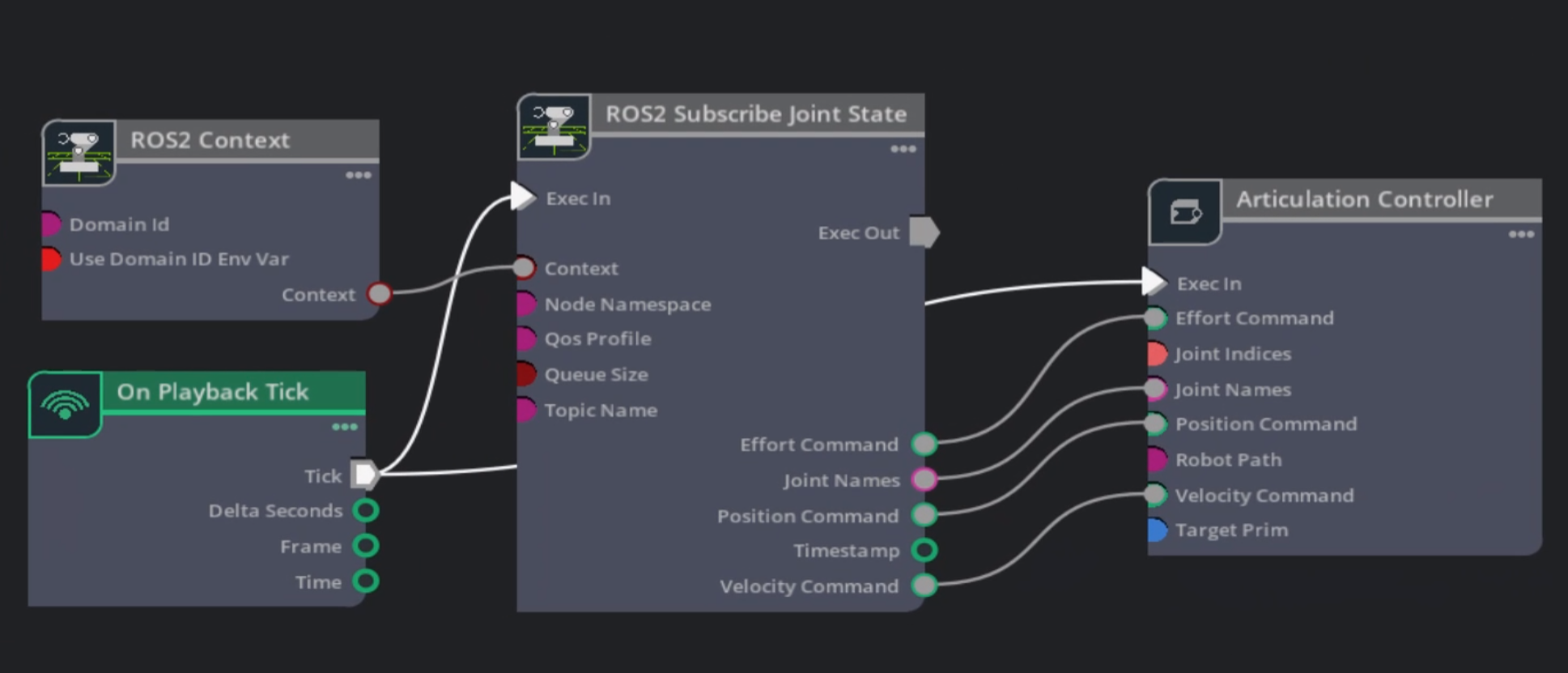
节点引脚连线
- On Playback Tick的Tick脉冲输出引脚 → ROS2 Subscribe Joint State的Exec In执行引脚;
- ROS2 Context的Context输出引脚 → ROS2 Subscribe Joint State的Context引脚(提供ROS通信环境);
- ROS2 Subscribe Joint State的Exec Out执行输出引脚 → Articulation Controller的Exec In引脚;
- ROS2 Subscribe Joint State的Joint Names输出引脚 → Articulation Controller的Joint Names引脚;
- ROS2 Subscribe Joint State的Velocity Command输出引脚 → Articulation Controller的Velocity Command引脚。
最终完整连线效果图:
- 仿真验证与问题说明 保存Graph配置,启动IsaacSim仿真;新开终端输入ROS2发布指令,即可使用 Ros2 进行关节运动:
ros2 topic pub /joint_command sensor_msgs/msg/JointState "{
name: ['front_wheel_joint'],
velocity: [50.0]
}"
3.3 ActionGraph 在机器人控制中的作用¶
3.3.1 数据流管理¶
ActionGraph 提供了清晰的数据流管理:
graph TB
A[ROS2 输入] --> B[数据转换]
B --> C[逻辑处理]
C --> D[控制输出]
D --> E[Isaac Sim]
E --> F[状态反馈]
F --> G[数据转换]
G --> H[ROS2 输出]
style A fill:#ccffcc
style E fill:#ffcccc
style C fill:#ffffcc
优势:
- 📊 可视化数据流向
- 🔍 便于调试和监控
- 🔄 支持实时修改
- 📝 自动生成文档
3.3.2 模块化设计¶
ActionGraph 支持模块化设计:
1. 子图(Subgraph)
- 将复杂逻辑封装为子图
- 提高可读性和可维护性
- 支持跨项目复用
2. 模板(Template)
- 预定义常用功能模块
- 快速搭建控制逻辑
- 保证一致性
3.3.3 调试和监控¶
ActionGraph 提供强大的调试功能:
1. 实时监控
- 查看节点的输入输出值
- 监控数据流动
- 检测异常状态
2. 断点调试
- 在节点处设置断点
- 单步执行
- 检查中间结果
3. 性能分析
- 查看节点执行时间
- 识别性能瓶颈
- 优化执行效率
3.3.4 与 Python 脚本的对比¶
| 特性 | ActionGraph | Python 脚本 |
|---|---|---|
| 学习曲线 | 低,可视化 | 中,需要编程基础 |
| 开发速度 | 快,拖拽即用 | 中,需要编写代码 |
| 灵活性 | 中,受限于节点库 | 高,完全自定义 |
| 调试难度 | 低,可视化调试 | 中,需要打印/断点 |
| 性能 | 中,有一定开销 | 高,直接执行 |
| 复用性 | 高,子图/模板 | 高,函数/类 |
| 适用场景 | 简单逻辑、快速原型 | 复杂算法、高性能 |
推荐使用场景:
- ✅ ActionGraph:ROS2 通信、简单控制逻辑、快速原型
- ✅ Python 脚本:复杂算法、高性能计算、批量处理
3.4 本章小结¶
本章详细介绍了 Isaac Sim 中的关节控制机制和 ActionGraph 可视化编程。
关键要点:
- 关节控制器:基于 PID 控制,通过刚度和阻尼参数调节
- ROS2 通信:通过
ROS2 Bridge实现 Isaac Sim 与 ROS2 的数据交换 - ActionGraph:可视化编程工具,适合快速原型和简单逻辑
- 控制流程:ROS2 指令 → ActionGraph → 关节控制器 → 物理引擎 → 关节运动
重要概念:
- 关节控制器 = PID 控制器 + 物理约束
- ActionGraph = 可视化编程 + 实时执行
- ROS2 Bridge = 数据转换 + 时间同步
- 控制模式 = 位置控制 / 速度控制 / 力矩控制
实践建议:
- 🎯 简单任务优先使用 ActionGraph
- 💻 复杂算法使用 Python 脚本
- 🔄 两者结合,发挥各自优势
- 🐛 充分利用 ActionGraph 的调试功能
下一章将介绍如何在 Isaac Sim 中实现机器人的全向轮底盘驱动、自主导航功能,包括 SLAM 建图、路径规划和避障控制。