3. 仿真环境与独立模块实践¶
3.1 仿真环境学习与搭建¶
3.1.1 Isaac Sim仿真十个步骤¶
本章节将系统阐述Isaac Sim仿真的十个基础步骤(十个关键维度),为零基础学习者构建完整的知识框架,十个方面如下所示:
- 物理空间:定义仿真环境的空间布局与基础物理特性,地面提供支撑,物体的物理属性和位置决定仿真初始状态与相互作用;
- 角色及物体:人、机器人等为核心活动对象,其物理模型与控制逻辑(如机器人关节控制)影响仿真真实性;
- 环境:含视觉(灯光)与物理(天气)环境,灯光提升场景层次,天气(如雨)或间接影响物体运动;
- 运动:角色运动受物理动力学约束,依物理原理计算运动状态,物体分静 / 动态,材质属性(摩擦系数等)关键,不同角色类型物理特性不同;
- 交互:含碰撞、接触力、传感器交互(摄像头等)、动态交互(抓取),碰撞检测与响应机制影响仿真真实性;
- 初始与边界条件:含角色初始位置、速度及仿真空间限制,是仿真基础设置;
- 数据记录与处理:记录角色运动、环境参数等数据,用于分析优化模型、支持后续研究;
- 物理引擎:以 NVIDIA PhysX 为代表,通过物理求解器支撑仿真物理动力学计算;
- 性能参数:如时间步长、空间分辨率等,需结合需求与硬件调整,平衡仿真精度与效率;
- 脚本与自动化:借助 Python 脚本实现仿真脚本化,通过批量运行实现自动化,提升效率。
注意: 为了提升学习效率,作者已针对本次赛事需求精选出相关核心步骤,帮助参赛者在短时间内掌握仿真基础技能,高效完成赛事任务。
3.1.1.1 物理空间构建¶
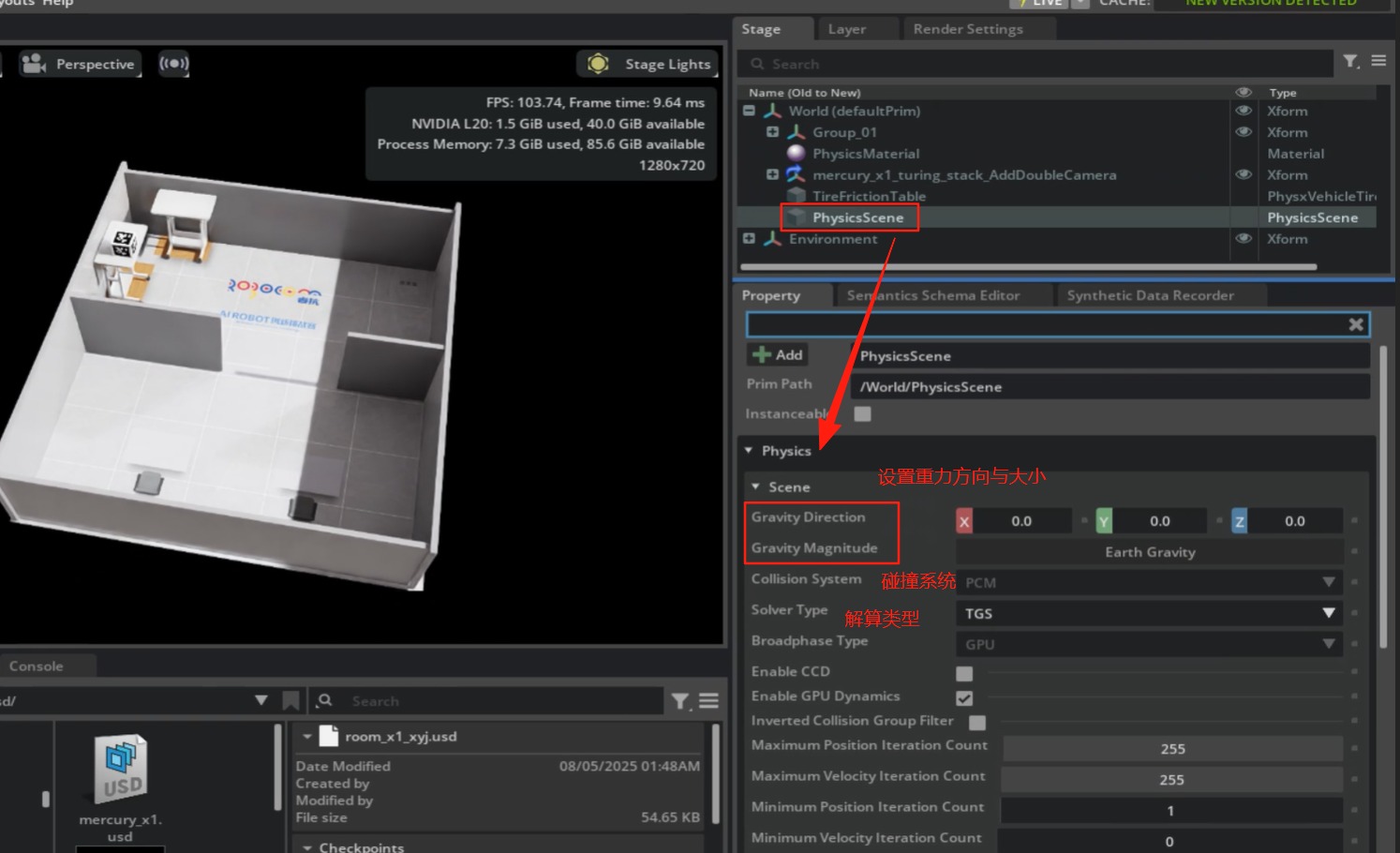
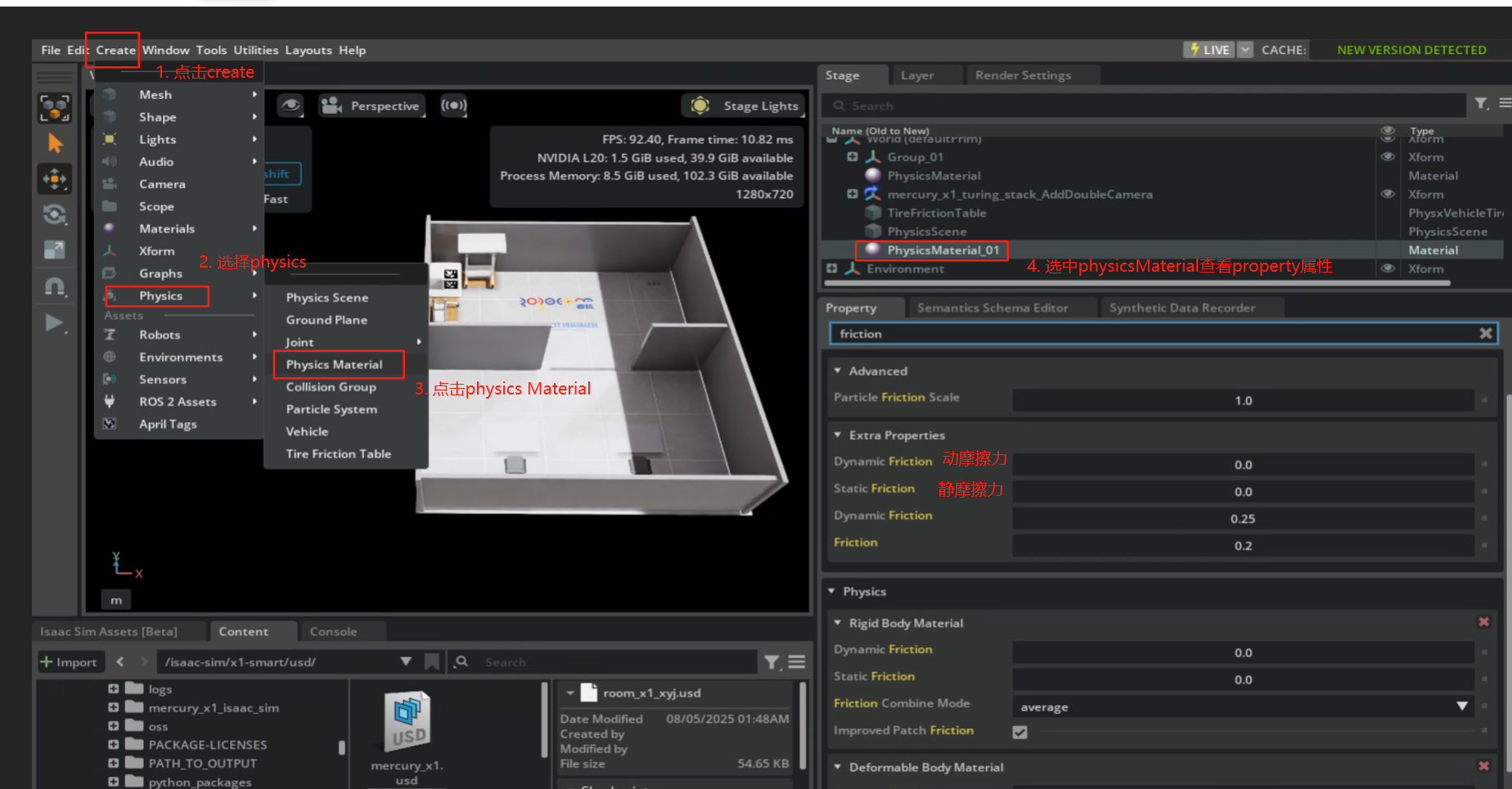
物理空间是机器人活动的基础场景,需通过 USD(Universal Scene Description)文件定义真实环境的核心要素。首先,需构建场景的主体结构,如工厂厂房的墙体、地面、工作台等,确保尺寸与布局贴合实际应用场景(如赛事场地的障碍物分布)。其次,需配置场景的物理属性,包括地面的摩擦系数(影响机器人底盘的运动稳定性)、物体的碰撞属性(避免机器人与场景元素发生穿模等非物理现象),以及全局的重力加速度(通常设置为地球重力 9.8m/s²,确保机器人运动、抓取等行为符合现实物理规律)。通过 USD 文件的统一管理,可实现场景的快速复用与修改,为后续仿真测试提供一致的基础环境。
- 场景与地面建模:USD,设置摩擦系数与摩擦力
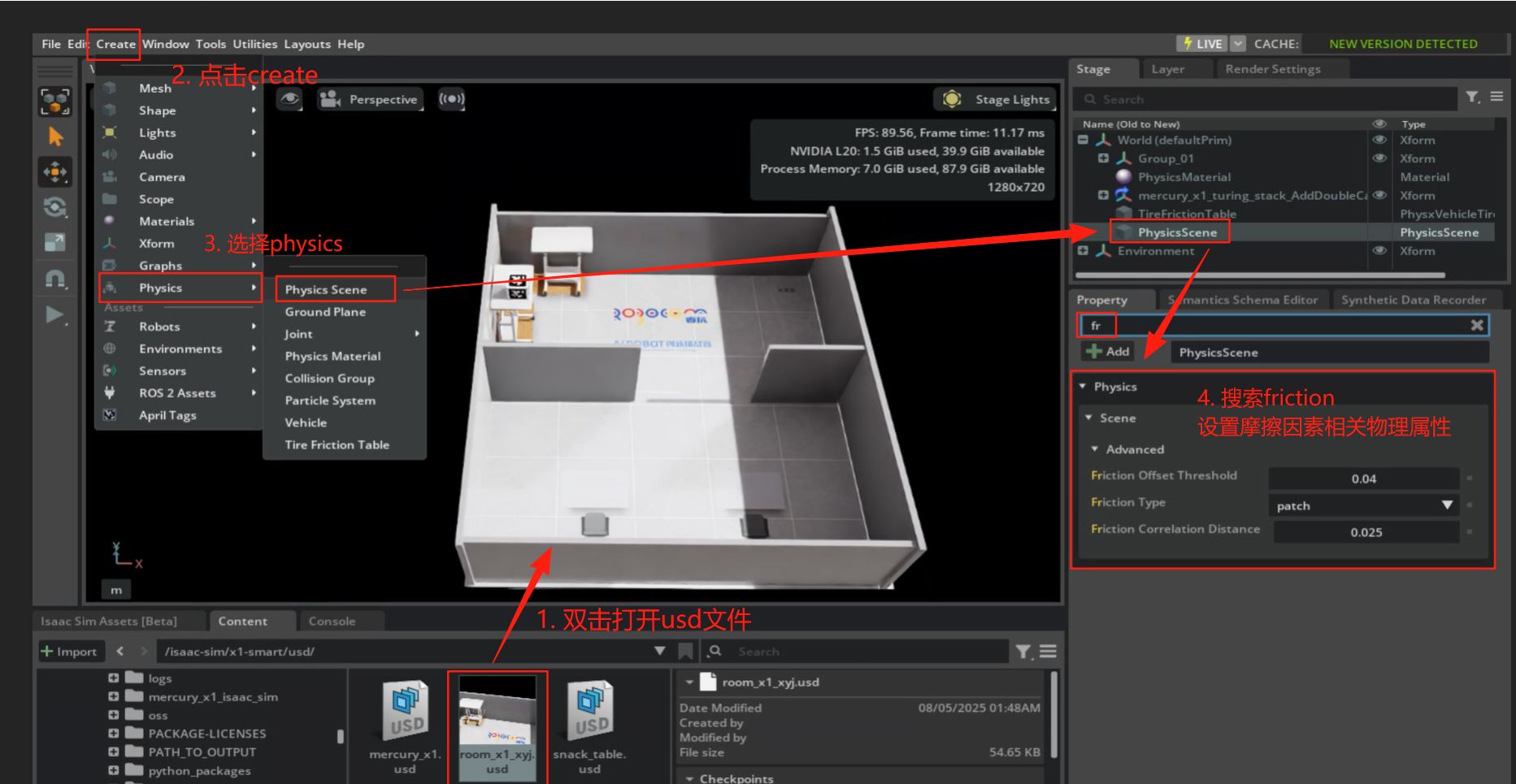
- 设置重力加速度
- 通过物理材料配置摩擦系数
3.1.1.2 X1仿真模型构建¶
3.1.1.2.1 URDF介绍¶
URDF 全称 (Unified Robot Description Format)统一机器人描述格式 ,是机器人模型描述的 “通用语言”。它通过定义机器人的 连杆(link) 、关节(joint) 及运动学关系,让复杂机械结构能被程序 “读懂” 。
- URDF 的实现:XML 语法
URDF 用 XML 标记语言 编写,语法逻辑很简单:
<标签名 参数="值"> 内容 </标签名>
- XML 语法示例:最基础的 URDF 模型
下面代码用 URDF 搭建了一个 “极简机器人模型”
<robot name="simple_robot"> <!-- 定义机器人模型,命名为 simple_robot -->
<!-- 定义第一个连杆:link1 -->
<link name="link1" />
<!-- 定义第二个连杆:link2 -->
<link name="link2" />
<!-- 定义关节 joint1,连接 link1 和 link2 -->
<joint name="joint1" type="fixed">
<parent link="link1" /> <!-- 父连杆是 link1 -->
<child link="link2" /> <!-- 子连杆是 link2 -->
</joint>
</robot> <!-- 模型定义结束 -->
逻辑拆解:
是 “容器”,包裹整个机器人的 link 和 joint 。 - link 像 “零件”,joint 像 “螺丝 + 连接规则”,把零件连起来。
- type="fixed" 表示关节是 “固定死的”(子连杆相对父连杆不会动),后续会讲可动关节(如旋转关节 revolute )。
3.1.1.2.2 URDF转USD¶
打开Import工具页面
工具的具体位置为
file->Import如下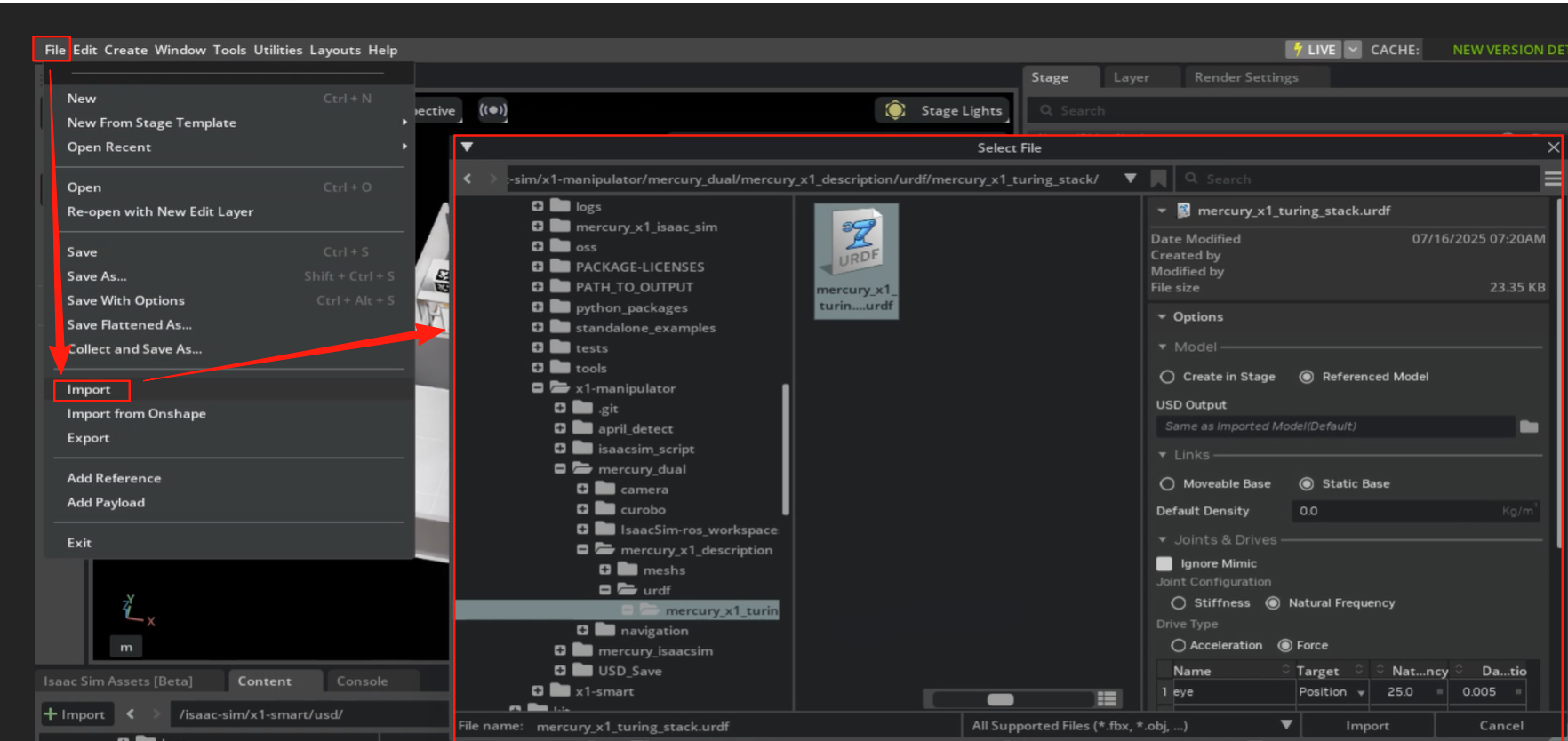
导入操作
- 找到要进行转换的URDF文件,具体路径:/isaac-sim/course-content/course_data/urdf2usd/urdf2usd_res/g1_12dof.urdf
- 选择要模型的导入选项,具体解析如下图
- 选择USD Output(USD转换文件输出)选项,如下图所示(注意:在G1机器人仿真项目中必须选择Moveable Base选项,否则机器人模型将无法移动,并且模型在导入过后就会出现错误)
- 同时指明需要的输出usd的具体文件夹, 具体操作如下:
.png)
3.1.1.3 物理引擎参数设置¶
物理引擎是仿真环境中实现真实物理交互的核心组件,其参数设置直接影响仿真的精度与性能。需根据任务需求配置以下关键参数:
仿真步长:即物理引擎计算物理状态的时间间隔(如 0.001 秒 / 步)。步长越小,仿真结果越精确(如机器人运动轨迹、碰撞冲击力的计算更细腻),但会增加计算负载;反之,步长过大会导致运动卡顿或碰撞检测延迟。对于 X1 机器人的导航与抓取任务,建议设置适中步长(如 0.01 秒),平衡精度与计算效率。
碰撞检测精度:包括碰撞体的几何简化程度(如使用凸包简化复杂物体的碰撞检测模型)和检测频率。对于零食抓取等高精度操作场景,需提高目标物体的碰撞检测精度,避免夹爪与物体的 “虚接触” 或 “漏抓取”;对于大范围导航场景,可适当简化障碍物的碰撞模型以提升效率。
动力学参数校准:针对机器人自身的物理特性,如底盘电机的驱动力矩、机械臂关节的阻尼系数等,需通过参数调整使仿真模型的运动响应(如加速、减速、停止时间)与实体机器人一致。例如,若仿真中小车刹车距离与实体不符,需修正底盘的摩擦力或驱动力参数。
3.1.1.4 脚本自动化部署¶
独立化脚本是什么?有什么用?要怎么实现?
在Isaac Sim中,Python脚本化开发可以通过两种方式实现:Extension(扩展)和Standalone(独立脚本)。
Extension(扩展):集成于Isaac Sim图形化界面内,一般用于测试Isaac Sim的API或搭建简单场景,需要依赖"runheadless.sh"脚本启动Isaac Sim且打开相关扩展方可验证脚本内容。
Standalone(独立脚本):此类脚本通常包含Isaac Sim应用程序启动、任务逻辑实现、仿真终止条件设置等内容,一般用于复杂任务场景,无需依赖"runheadless.sh"进行启动Isaac Sim。
下面就是独立化脚本的核心部分,通过配置的CONFIG来启动仿真Isaac Sim:
from isaacsim import SimulationApp
# 仿真配置(合并两者配置,以用户配置为主)
CONFIG = {
"width": 1280,
"height": 720,
"window_width": 1920,
"window_height": 1080,
"headless": True,
"hide_ui": False,
"renderer": "RaytracedLighting",
"display_options": 3286,
}
simulation_app = SimulationApp(launch_config=CONFIG)
from isaacsim.core.utils.extensions import enable_extension
# 启用必要的扩展
simulation_app.set_setting("/app/window/drawMouse", True)
enable_extension("omni.kit.livestream.webrtc")
enable_extension("omni.isaac.ros2_bridge")
一般脚本化开发包含以下方面:
基本元素(Prim):Prim(Primitive)是 USD(通用场景描述)中的基本构建块,代表仿真环境中的任何对象,如机器人、传感器或环境物体。
舞台(Stage):舞台是 USD 的核心概念,定义了 Prim 的逻辑组织和空间关系。
场景(Scene):场景是世界的子集,包含一组关联的 Prim。
世界(World):世界是仿真的全局管理者,功能包括。
仿真(Simulation):仿真是推动虚拟环境随时间变化的核心机制。
应用(Application):应用是仿真的"外壳",负责管理渲染、交互、扩展。
3.1.1.5 关键USD操作¶
在使用独立脚本管理仿真环境时,对USD模型的精准控制至关重要。以下四个操作是处理机器人模型时的核心技能。
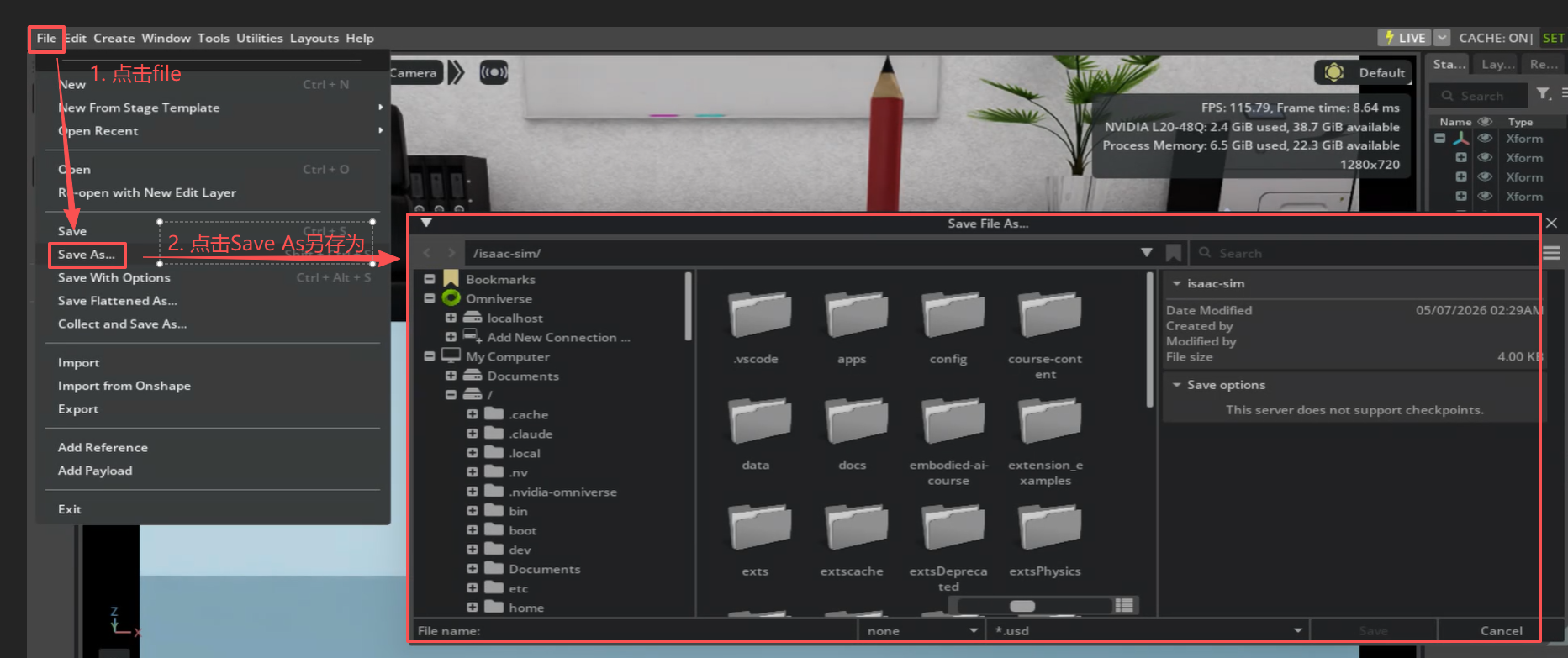
- 另存为(Save As) 将当前打开的Stage保存为一个新的USD文件。这能保留所有修改,同时不覆盖原始文件,便于版本管理和调用。
- 去掉引用(Flatten)
导入的URDF模型会保留对外部几何文件的引用。去掉引用可将所有外部依赖“展平”并内化到当前USD文件中,使文件成为一个完全独立的包,避免路径丢失导致模型无法加载。
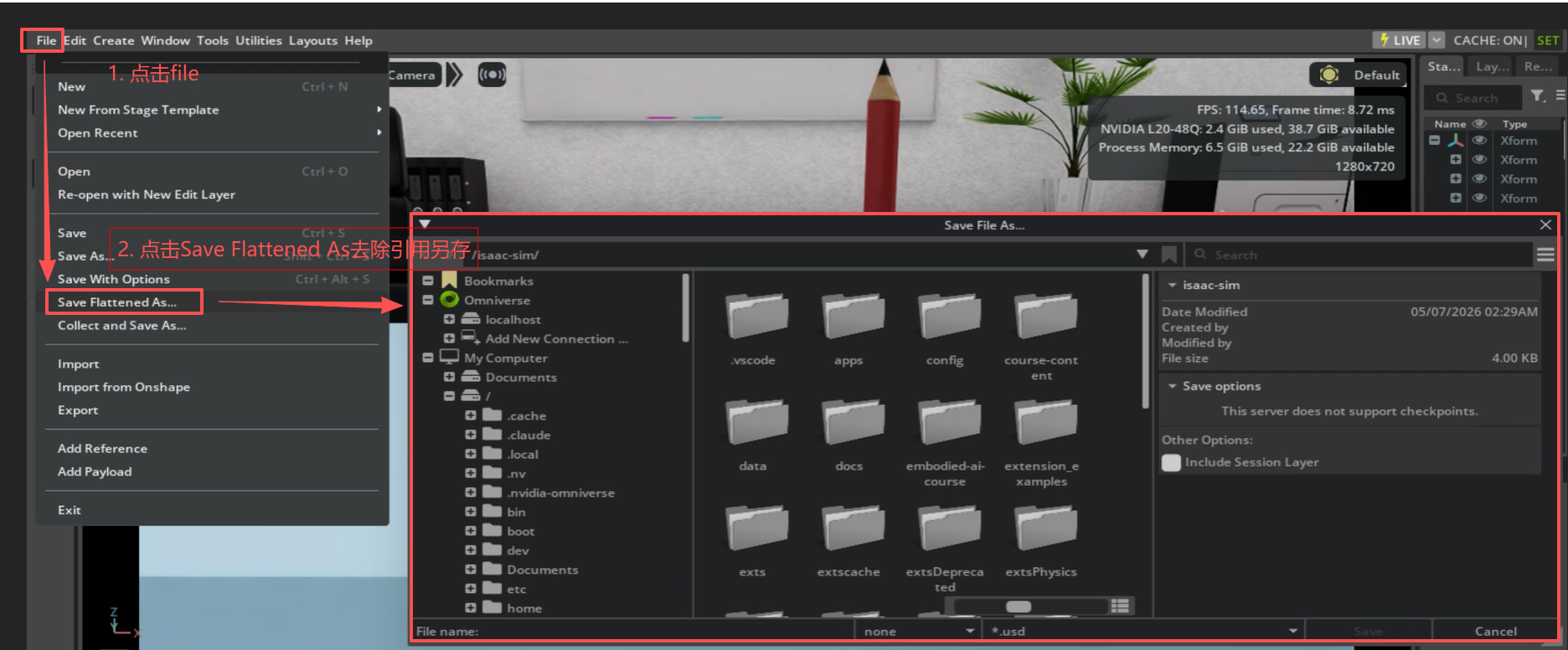
可以理解为,通过这一步操作,就可以将USD内部所有的引用“去除”,并改为本地当前独立的USD。在Isaac Sim中通过“Flatten”可确保USD无论在哪都能正常打开,不依赖于任何引用。
- USD关节链(Joint Chain)
在USD中,机器人关节由PhysicsJoint定义,所有关节和刚体链接会组成一个层级树。一个清晰的关节链是机器人运动学求解和物理仿真的基础。
以下是一个拓展代码,在Isaac Sim中使用“”跑通该代码,可在控制台日志中看到USD完整的关节链。

from collections import defaultdict, deque
import omni
from pxr import Usd, UsdPhysics
def s(p): return p.split('/')[-1] if p else '<none>'
def get_root(p):
while p and p.IsValid():
if p.HasAPI(UsdPhysics.ArticulationRootAPI): return p
p = p.GetParent()
return None
def get_prefix(r):
par = r.GetParent()
return str(par.GetPath()) if par and str(par.GetPath())!='/' else str(r.GetPath())
def is_joint(p):
return p.IsA(UsdPhysics.RevoluteJoint) or p.IsA(UsdPhysics.PrismaticJoint) or p.IsA(UsdPhysics.FixedJoint)
def collect_joints(stage, pre):
return [p for p in stage.Traverse() if (str(p.GetPath()).startswith(pre+'/') or str(p.GetPath())==pre) and is_joint(p)]
def get_target(rel):
return str(rel.GetTargets()[0]) if rel.GetTargets() else None
def build_graph(joints):
out, inn = defaultdict(list), defaultdict(list)
for j in joints:
b0 = get_target(UsdPhysics.Joint(j).GetBody0Rel())
b1 = get_target(UsdPhysics.Joint(j).GetBody1Rel())
if b0 and b1:
out[b0].append({"p":str(j.GetPath()),"b1":b1})
inn[b1].append(1)
return out, inn
def print_tree(pre, root, joints):
out, inn = build_graph(joints)
bodies = {i['b1'] for e in out.values() for i in e} | {k for k in out.keys()}
base = next((b for b in bodies if not inn.get(b)), next(iter(bodies), None)) if bodies else None
if not base: print("\nNo bodies found"); return
print(f"\nArticulation Root: {root}\nRobot Prefix: {pre}\nJoint Count: {len(joints)}\nTree:")
q, vis = deque([(base, '')]), set()
while q:
body, ind = q.popleft()
if body in vis: continue
vis.add(body)
print(f"{ind}{s(body)}")
edges = sorted(out.get(body, []), key=lambda x:x['p'])
for i, e in enumerate(edges):
end = i == len(edges)-1
print(f"{ind}{'└─' if end else '├─'} ({s(e['p'])}) {s(e['b1'])}")
if e['b1'] not in vis: q.append((e['b1'], ind + (' ' if end else '│ ')))
def main():
ctx = omni.usd.get_context()
stage, sel = ctx.get_stage(), ctx.get_selection().get_selected_prim_paths()
if not sel: print("No prim selected"); return
prim = stage.GetPrimAtPath(sel[0])
if not prim.IsValid(): print("Invalid prim"); return
root = get_root(prim)
if not root: print("No articulation root found"); return
print_tree(get_prefix(root), str(root.GetPath()), collect_joints(stage, get_prefix(root)))
main()
- ArticulationRoot
这是链接关节链中必须存在的一个API。它被应用在关节链的根节点上,告诉PhysX物理引擎:“从这个节点开始,以下所有关节和链接构成一个受控的机器人整体”。缺少它,机器人会瘫软或部件飞散。 (注:导入URDF时勾选“Moveable Base”选项,本质上就是自动添加这个API。)
Articulation(关节链)本质是减缩坐标仿真系统,用 “根刚体姿态 + 关节角度” 描述整个机械系统,而非每个刚体的世界坐标USD。
Articulation Root 的核心作用是:
标记关节链的计算起点,建立减缩坐标的参考系
告诉仿真引擎:“这个子树下的所有关节和刚体,要用减缩坐标算法模拟”
决定根刚体的选择(固定 / 浮动基座的关键)
与ActionGraph也紧密相关:(后续在04章节会详细讲什么是ActionGraph)
以下独立脚本演示了如何用代码实现这些操作:将一个导入的URDF机器人模型另存为新文件,去掉外部引用使其可移植,并检查关键的ArticulationRoot状态。
from isaacsim import SimulationApp
# 1. 启动仿真应用
CONFIG = {"headless": False}
simulation_app = SimulationApp(CONFIG)
# 导入所需模块
import omni.usd
from pxr import UsdPhysics, Sdf
# 2. 获取当前Stage
stage = omni.usd.get_context().get_stage()
prim_path = "/World/X1_Robot" # 假设机器人已导入到此路径
robot_prim = stage.GetPrimAtPath(prim_path)
# 3. 关键操作:另存为并去掉引用(展平)
output_path = "C:/Users/YourName/Documents/X1_Standalone.usd"
# export_paths 指定要导出的Prim,这里导出整个X1机器人
# flatten_content=True 会去掉所有引用,将所有依赖内化
stage.Export(output_path, export_paths=[prim_path], flatten_content=True)
print(f"机器人模型已另存为独立文件:{output_path}")
# 4. 验证并设置ArticulationRoot
articulation_api = UsdPhysics.ArticulationRootAPI.Apply(robot_prim)
if articulation_api:
print("ArticulationRootAPI 已应用。")
else:
print("ArticulationRootAPI 应用失败,请检查。")
# 5. 关闭仿真
simulation_app.close()